Inertia/vision integrated navigation method adopting PSO (particle swarm optimization)-based CKF (cubature kalman filter)
A particle swarm optimization and integrated navigation technology, which is applied in the field of inertial/visual integrated navigation, can solve the problems that the visual navigation system cannot provide long-term high-precision navigation, and the accuracy of the inertial visual integrated navigation system decreases.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0064] Below in conjunction with accompanying drawing, the present invention is described in further detail:
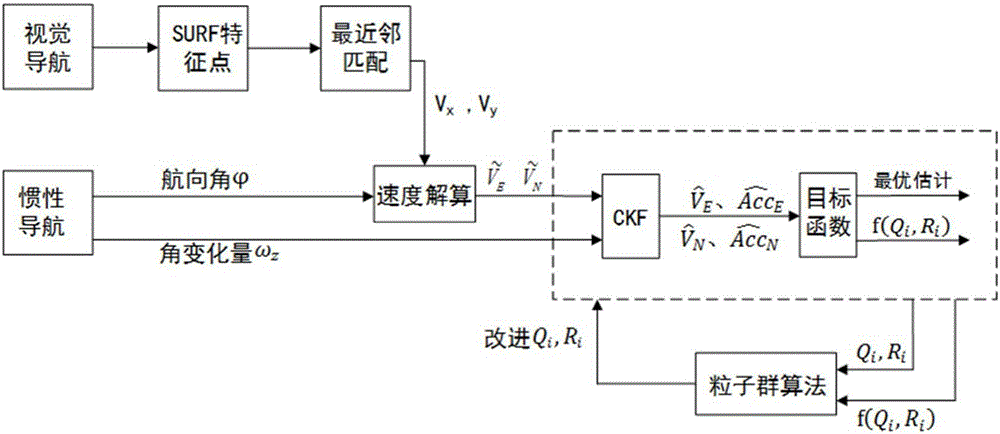
[0065] The present invention is an inertial / visual combined navigation method using CKF (Cubature Kalman filters, volumetric Kalman filter) based on particle swarm optimization. The process is as follows figure 1 shown, including the following steps:
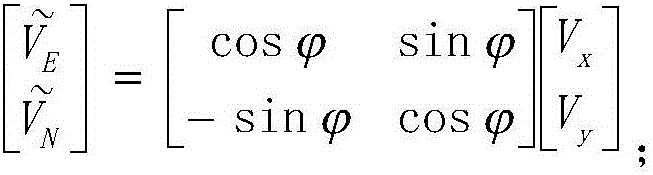
[0066] Step 1: When the visual signal is valid, use the camera on the mobile robot to collect dynamic video, and determine the speed of the camera through image feature extraction and nearest neighbor matching; use the SURF (Speeded Up Robust Features) algorithm to extract the video respectively SURF feature points in two adjacent image frames, and record the position coordinates of the feature points in the image coordinate system, and match the SURF feature points on the two frames of images according to the nearest neighbor matching method to determine whether the camera is on the horizontal plane The speed V x , V...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com