Numerical control device
A technology of numerical control devices and moving paths, which is applied in digital control, electrical program control, etc., and can solve problems such as longer moving time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
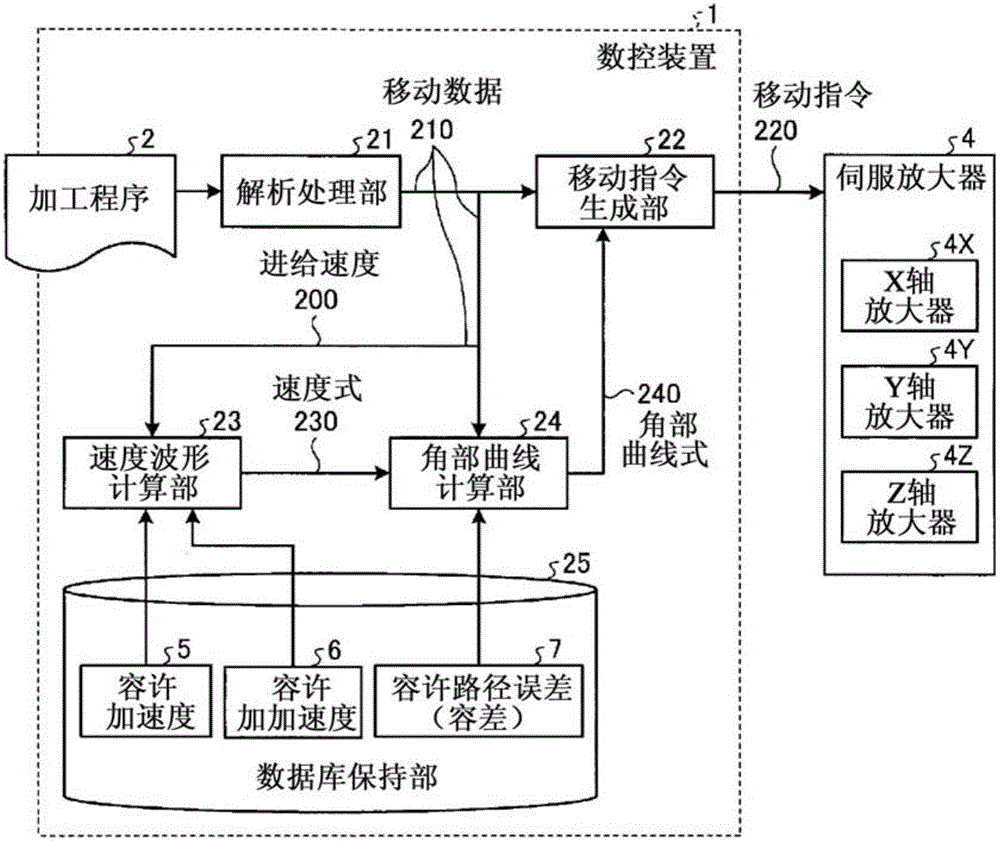
[0027] figure 1 It is a block diagram showing the configuration of the numerical control device 1 according to Embodiment 1 of the present invention. The numerical control device 1 is a device that executes numerical control (NC: Numerical Control) on a machine tool not shown.
[0028] The numerical control device 1 has an analysis processing unit 21 , a movement command generation unit 22 , a velocity waveform calculation unit 23 , a corner curve calculation unit 24 , and a database holding unit 25 . The machine tool equipped with the numerical control device 1 controls each travel axis so as to move to the position commanded by the machining program 2, that is, the NC machining program, thereby moving the table or the tool, which is a movable part on which a workpiece can be placed. , thereby controlling the positional relationship between the workpiece and the tool on the table, thereby performing machining on the workpiece.
[0029] The numerical control device 1 perform...
Embodiment approach 2
[0138] Next, the numerical control device 1 according to Embodiment 2 will be described. The structure and figure 1 same. Hereinafter, the description will focus on the differences from Embodiment 1. FIG.
[0139] In the numerical control device 1 according to the first embodiment, in the movement command generation unit 22, a method of smoothing the speed of each axis is used by replacing the movement path described in the machining program 2 with a path including corner curves. . On the other hand, the configuration of the movement command generation unit 22 of the numerical control device 1 according to the second embodiment is different from the configuration of the movement command generation unit 22 of the first embodiment. In the movement command generating unit 22 according to the second embodiment, a method is used in which the speed waveforms of the respective axes are smoothed by providing a plurality of constituent elements that perform interpolation processing....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com