Omni-bearing obstacle avoidance method for cleaning robot and device thereof
A cleaning robot, all-round technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, instruments and other directions, can solve the problems of simple rigidity, poor obstacle avoidance smoothness, low efficiency, etc., to improve work Efficiency, the effect of reducing the blocking time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
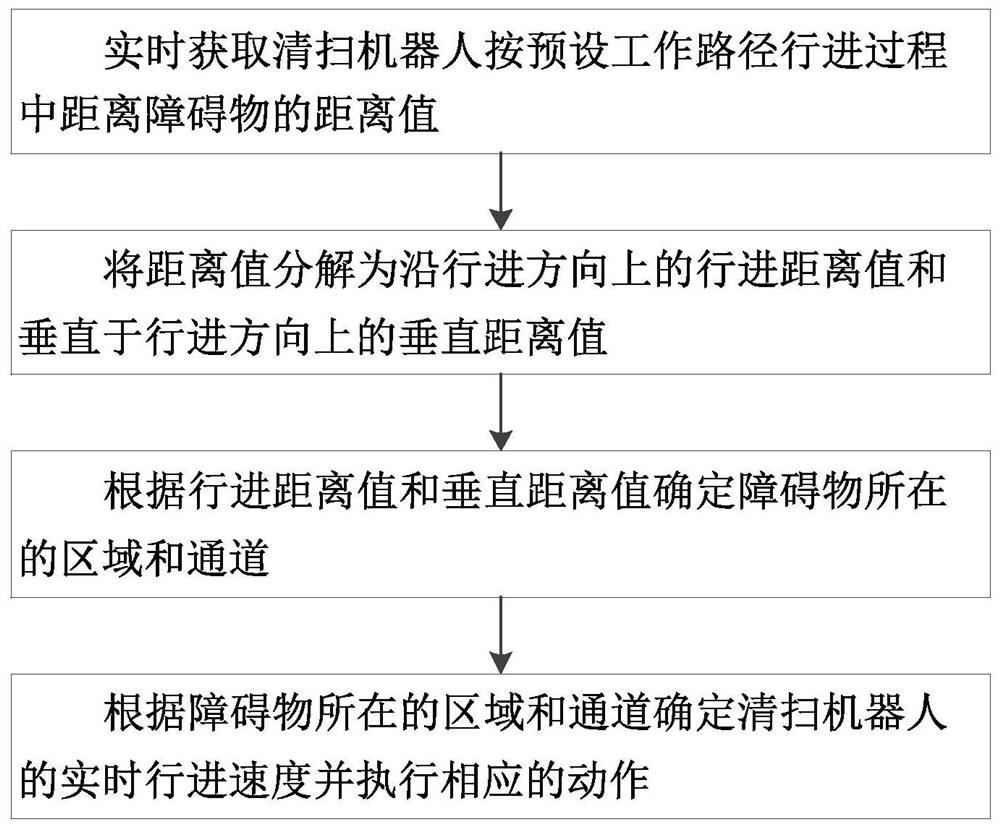
[0051] Such as figure 1 As shown, the embodiment of the present invention provides an all-round obstacle avoidance method for a cleaning robot, including the following steps:
[0052] Step 1. Obtain the distance value of the cleaning robot from the obstacle in the process of traveling according to the preset working path in real time;
[0053] Step 2, decomposing the distance value into a travel distance value along the travel direction and a vertical distance value perpendicular to the travel direction;
[0054] Step 3, determine the area and channel where the obstacle is located according to the travel distance value and the vertical distance value;
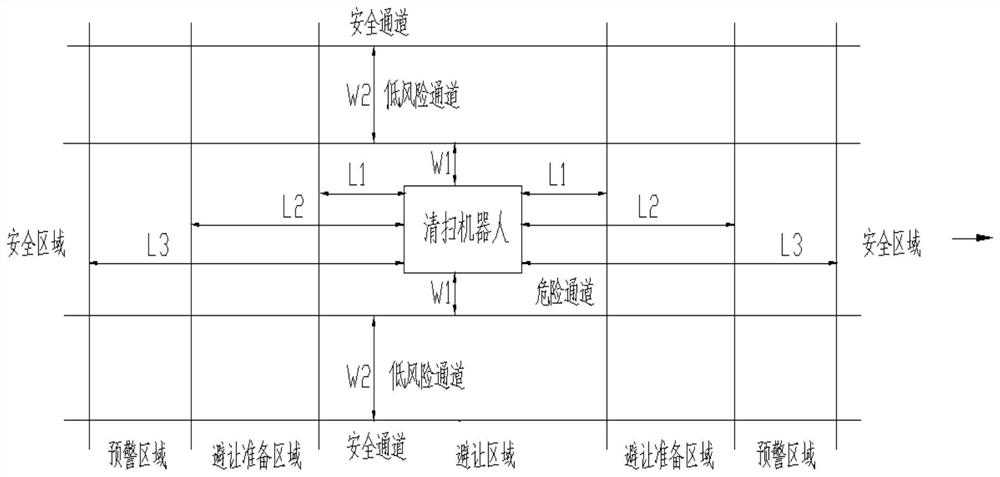
[0055] Channels are multiple channels centered on the cleaning robot and have different safety distance thresholds perpendicular to the direction of travel; areas are multiple areas centered on the cleaning robot and have different safety distance thresholds along the direction of travel; travel distance value, vertical Both ...
Embodiment 2
[0095] The implementation of the present invention provides an all-round obstacle avoidance device for a cleaning robot, including:
[0096] The distance acquisition module is used to obtain the distance value of the cleaning robot from the obstacle in the process of traveling according to the preset working path in real time;
[0097] A distance decomposition module, configured to decompose the distance value into a travel distance value along the travel direction and a vertical distance value perpendicular to the travel direction;
[0098] The area channel module is used to determine the area and channel where the obstacle is located according to the travel distance value and the vertical distance value;
[0099] The control execution module is used to determine the real-time travel speed of the cleaning robot and perform corresponding actions according to the area and passage where the obstacle is located;
[0100] Among them, the channel is a plurality of channels centere...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com