Wide-size-range multi-space target capture tracking method
A size range, target capture technology, applied in the field of space target capture and tracking, can solve the problems of large image size variation, non-unique number, difficult target capture, etc., to achieve the effect of fast capture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
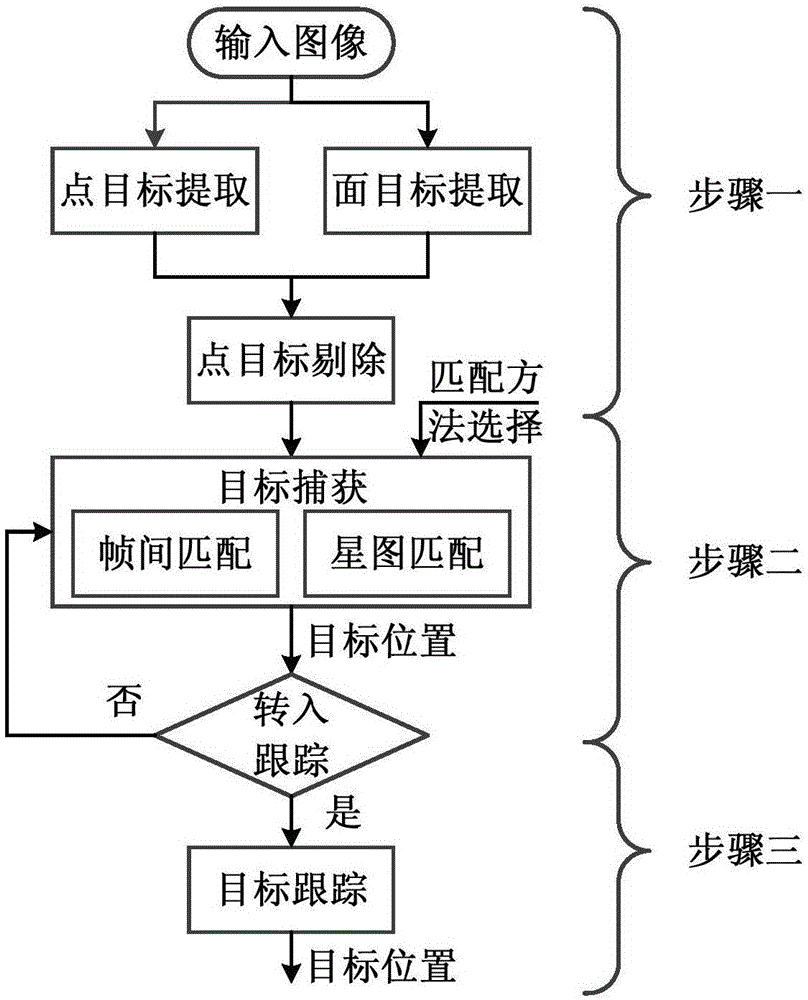
[0044] Such as figure 1 As shown, a flow chart of a wide-scale multi-space target acquisition and tracking method, the steps are as follows:
[0045] 1) For the input image, point target extraction and area target extraction are performed synchronously. Among them, the point target extraction is to perform median filtering on the image, then perform rough positioning through maximum value detection and Gaussian characteristic judgment, and then calculate the centroid of the point target by calculating the moment. Surface object extraction first binarizes the input image, then performs horizontal and vertical downsampling (typical value: 4 times downsampling), and performs connected domain detection on the sampled binarized image, and each connected domain corresponds to a surface object, and then calculate the moments of each connected domain and find the centroid of the surface object. Center the centroid of the area object, open a window with the length of the connected do...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com