Substation patrol robot obstacle avoidance method based on laser radar
A technology of inspection robot and laser radar, which is applied in two-dimensional position/channel control and other directions, can solve the problems of short detection distance, impact, and limited appearance design of substation inspection robot, so as to reduce the possibility of collision with obstacles , reduce the number of installations, and increase the detection distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
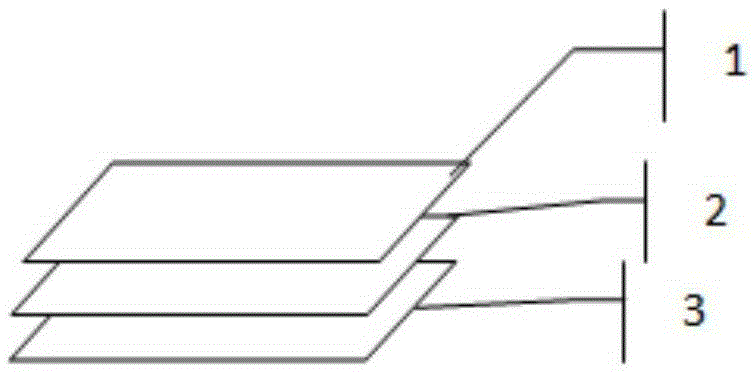
[0034] Such as figure 1 As shown, the obstacle avoidance method of the substation inspection robot based on lidar requires the use of an integrated substation inspection robot, and the robot needs to be equipped with lidar, industrial computer and driver.
[0035] LiDAR uses LAN to communicate with industrial computer.
[0036] The industrial computer and the drive are connected with the industrial computer using the RS232 interface.
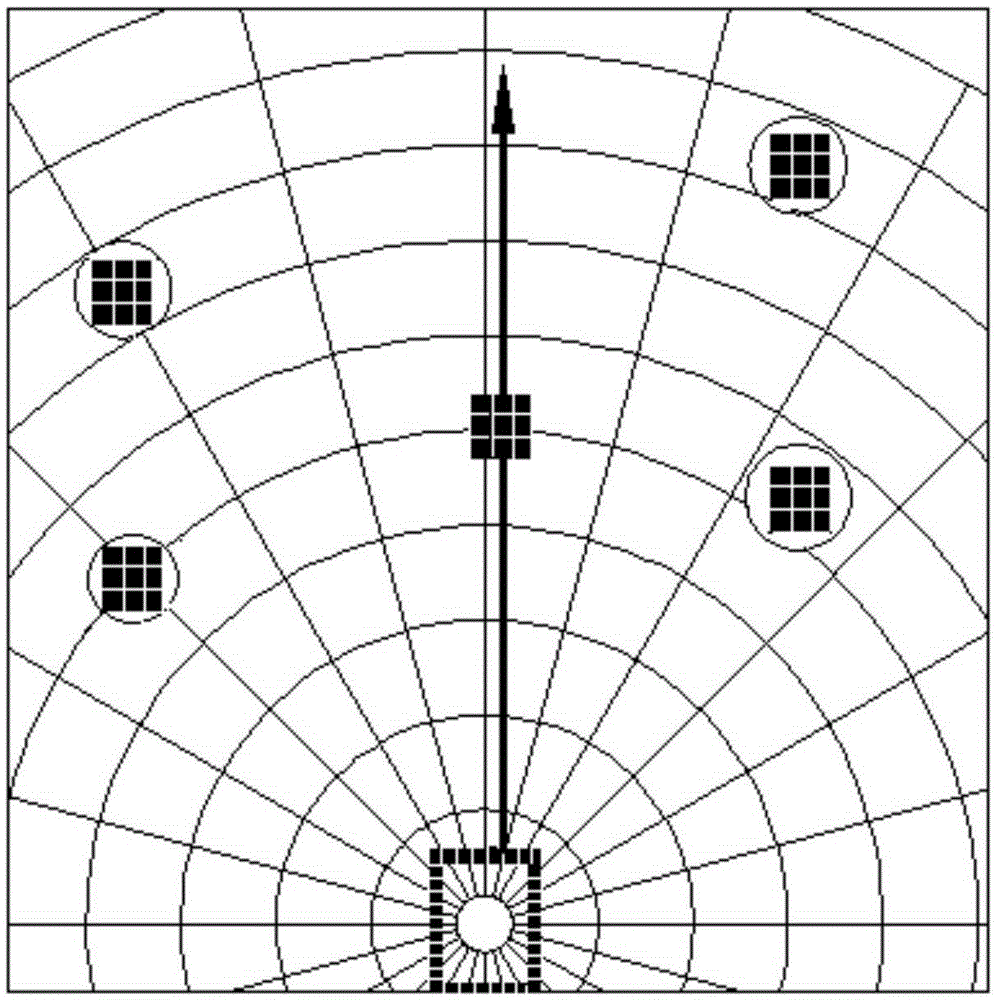
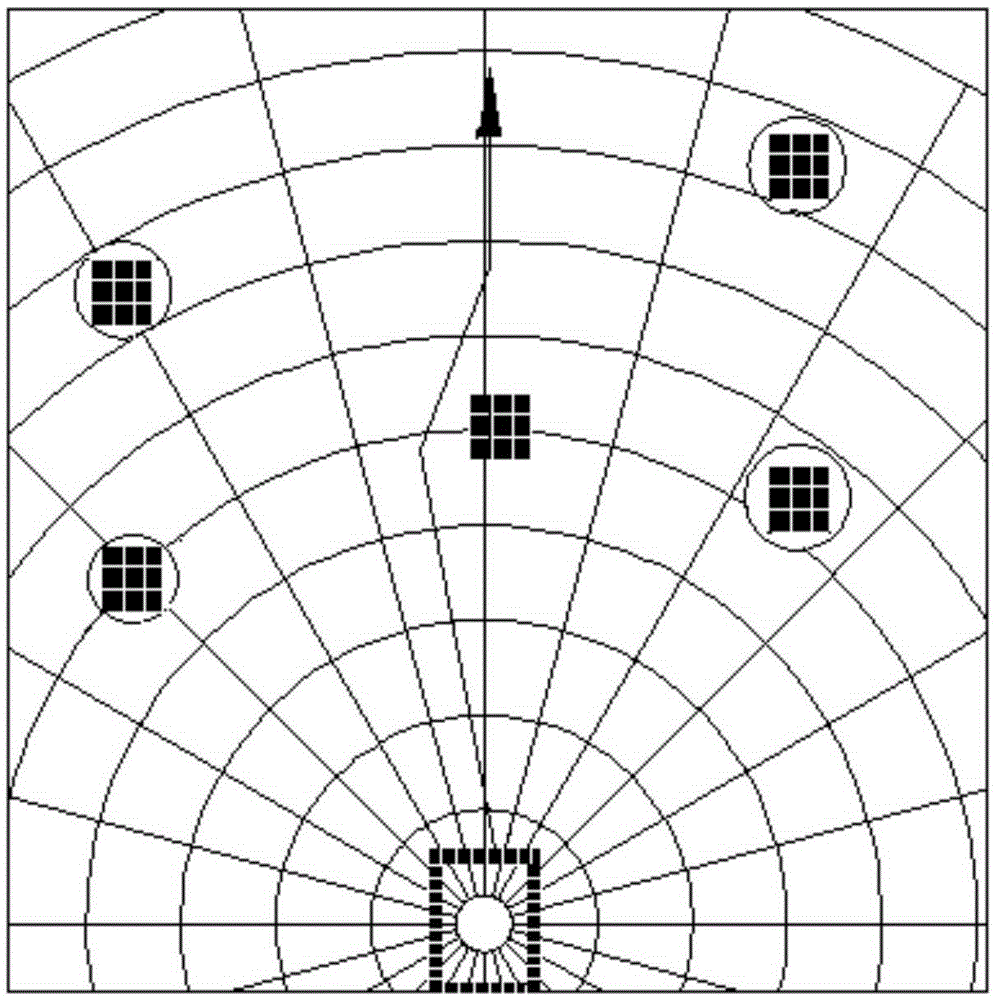
[0037] Obstacle avoidance method of substation inspection robot based on laser radar The robot needs to clarify its specific position in the substation. The laser radar carried by the robot scans the surrounding environment during driving and obtains the distance information of the robot body to the surrounding objects. The algorithm is compared with the known environment map to filter out the location of obstacles.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com