An electromagnetic mechanical gripper with adjustable clamping force and its application method
A robotic gripper and electromagnetic technology, applied in the field of robotics, can solve the problems of high cost, low efficiency, poor control of grasping force, etc., and achieve the effects of fast response, reduced occupied volume, and improved work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below with reference to the drawings and specific embodiments, but the present invention is not limited to these embodiments.
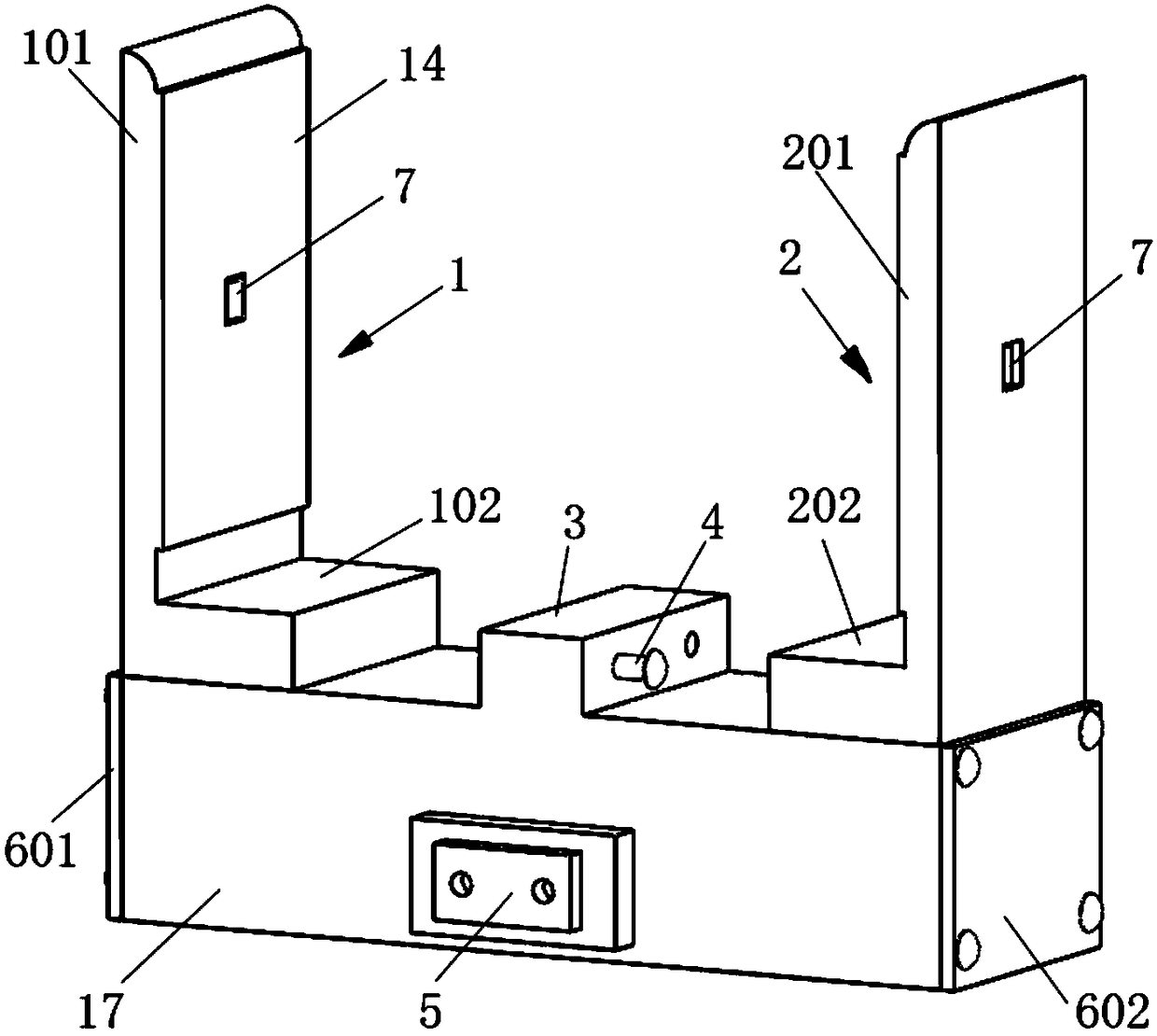
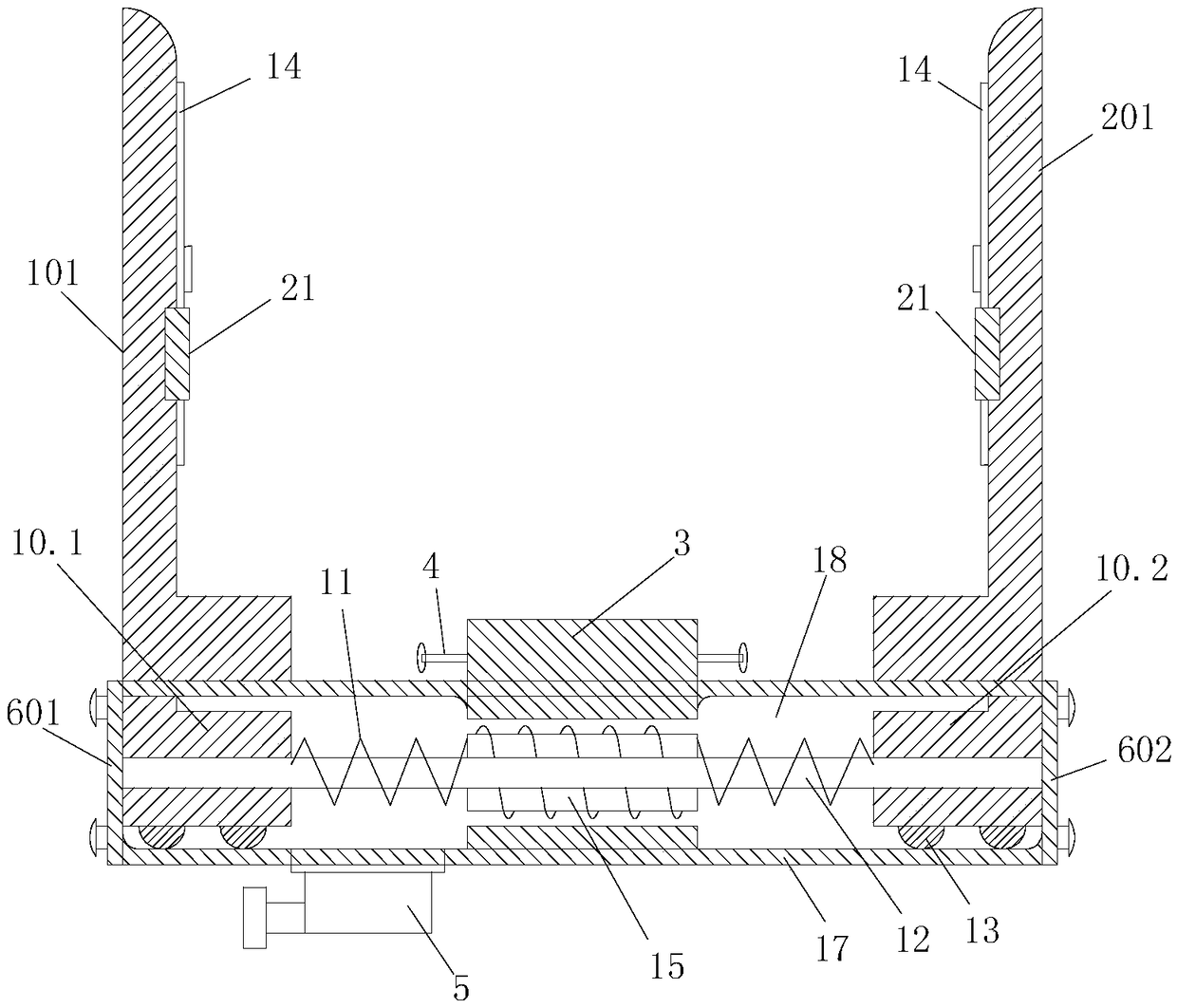
[0031] Such as Figure 1 to Figure 4 As shown, an electromagnetic manipulator claw with adjustable clamping force includes a left-hand claw 1, a right-hand claw 2, a left-hand permanent magnet 10.1, a right-hand permanent magnet 10.2, an electromagnet 15, a single-chip microcomputer, and power supply for the electromagnet 15. The electromagnet power supply line. The single-chip microcomputer is connected with the electromagnet power supply line, and the current on the electromagnet power supply line is adjustable.
[0032] The electromagnetic manipulator claw also includes a base 17, the left and right claws are respectively mounted on the base 17, and the electromagnet 15 is arranged in the base 17. The base 17 is a sealed structure, which can effectively play a role of dustproof and water...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com