Low speed impact position identification method based on approximate entropy calculation
A technology of low-speed impact and identification method, applied in impact testing, measurement devices, optical devices, etc., can solve the problems of low practicability, reduced Lamb wave accuracy, Lamb wave dispersion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
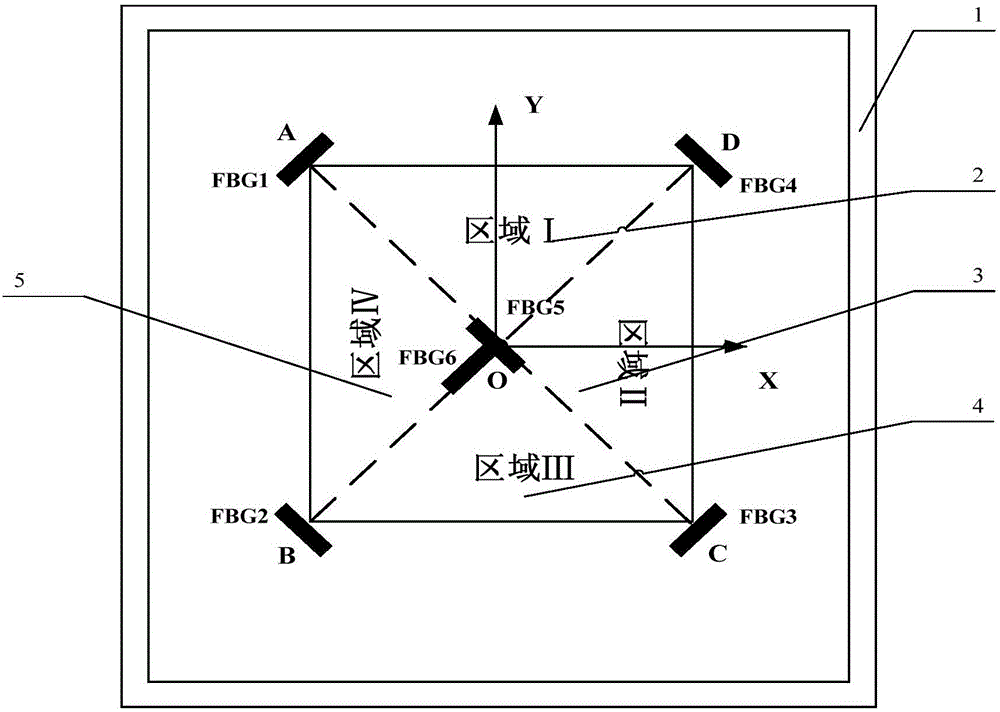
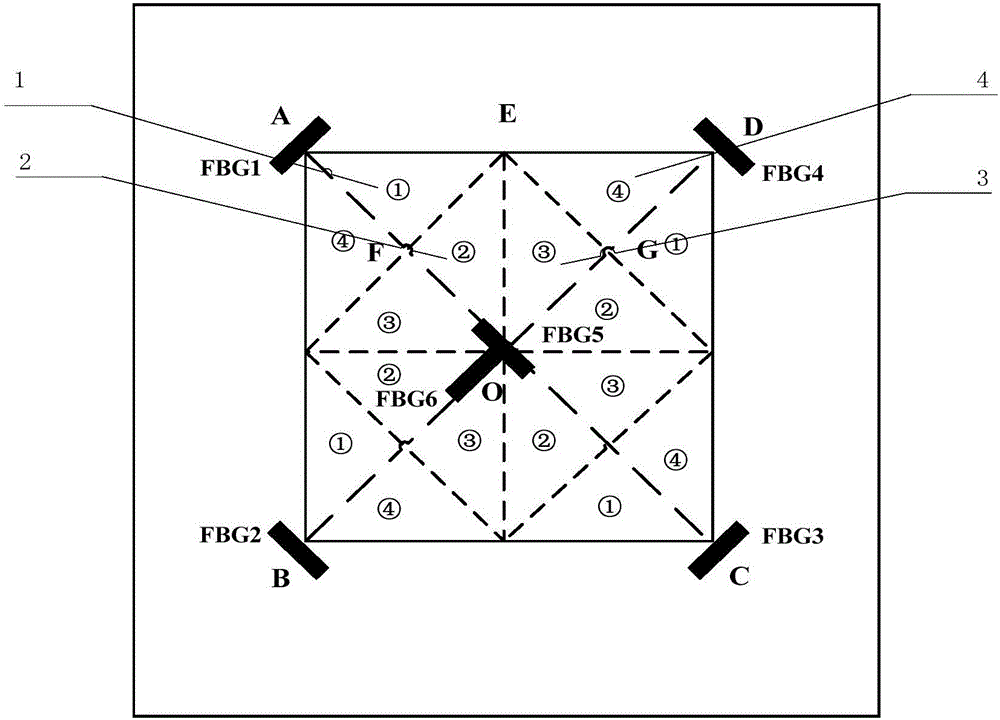
[0092] Step 1, distributed fiber Bragg grating sensor layout;
[0093] Select a square monitoring area ABCD at the center of the four-sided fixed support plate structure, where point A is located at the top left corner of the monitoring area, and A, B, C, and D are distributed in the counterclockwise direction at each vertex of the square monitoring area; select the plate structure to be monitored As the origin of the coordinates, establish a two-dimensional Cartesian coordinate system, define the X-axis parallel to the AD direction, and the Y-axis parallel to the AB direction; at the vertex positions A and C of the monitoring area, the axes are arranged parallel to the diagonal BD of the square monitoring area The Fiber Bragg Grating sensors are counted as FBG1 and FBG3 respectively, and the Fiber Bragg Grating sensors whose axes are parallel to the diagonal line AC of the square monitoring area are arranged at the apex positions B and D of the monitoring area, which are respe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com