


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for analyzing dynamic load capacity work space of six-degree of freedom space manipulator
A technology of space manipulators and dynamic loads, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as damage to manipulator joints, loss, and inability to complete tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
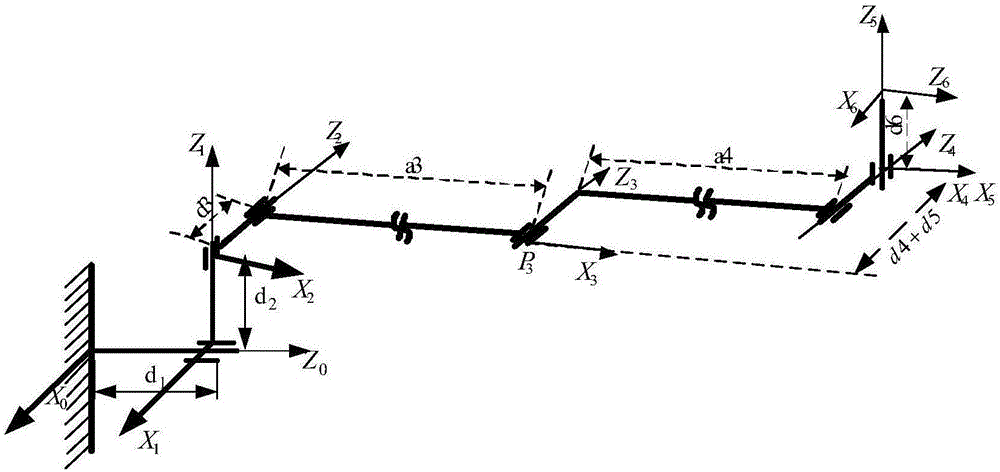
[0069] 1. Establish a six-degree-of-freedom space manipulator kinematics model such as figure 1 As shown, its D-H parameter description is shown in Table 2.
[0070] Table 2 Robotic arm DH parameters
[0071]
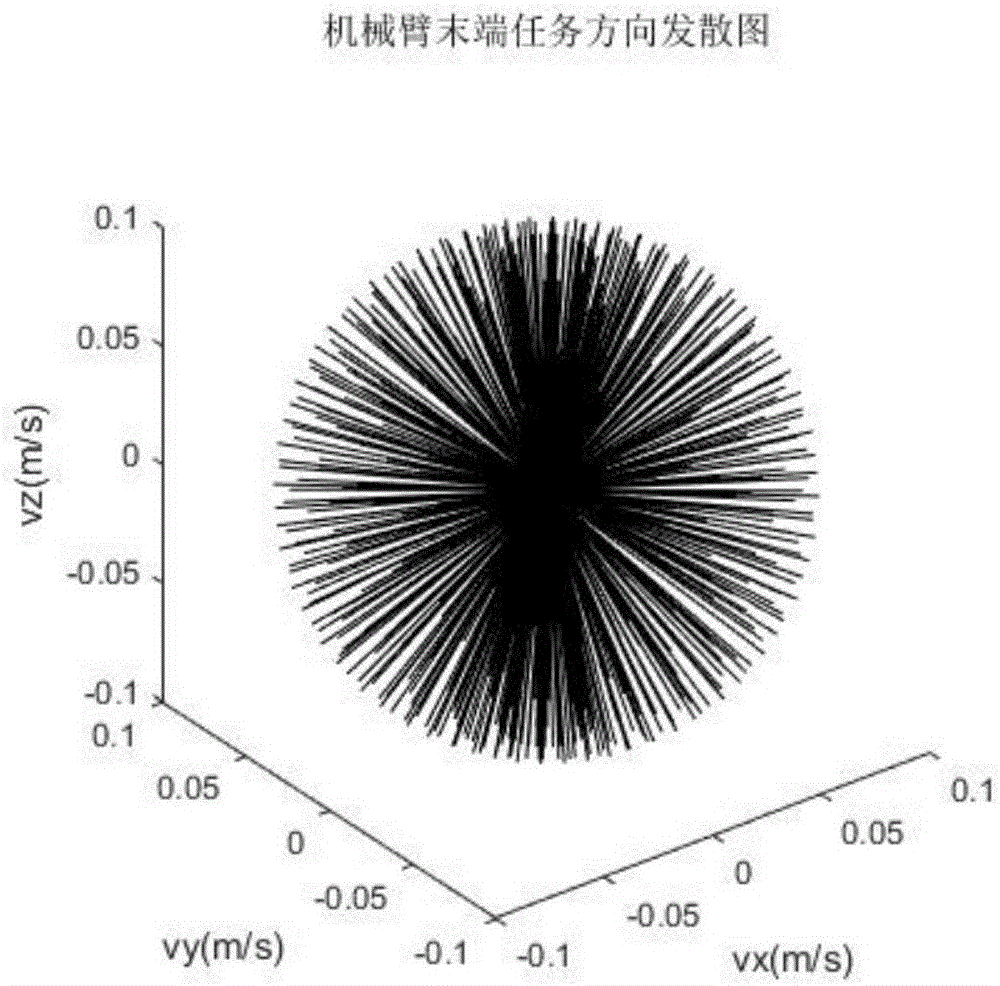
[0072] Using the Monte Carlo method, set the rotation range of each joint angle to [-180,180], set the number of random times to 5000, and generate its workspace, such as image 3 shown.
[0073] 2. Carry out position-level inverse solution for each point in the working space, and obtain the six-degree-of-freedom space manipulator configuration set Q. Taking the point [3.6,-4,2,90,-30,-90] (in m and °) in the workspace as an example, the corresponding configuration set can be obtained as shown in Table 3.
[0074] Table 3 Configuration set of six degrees of freedom manipulator
[0075]
[0076] 3. Select the maximum value v of velocity and acceleration max =0.1m / s, a max =0.02m / s 2 , traverse the direction angles α and β at intervals of 10° in the range [0,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com