Folding parallel mechanism, crawling method and surmounting obstacle method of bionic starfish movement
A technology of movement and starfish, applied in the field of robots, can solve the problems of sensitive environmental conditions, complicated mechanism, and increased control difficulty, and achieve the effect of convenient control and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
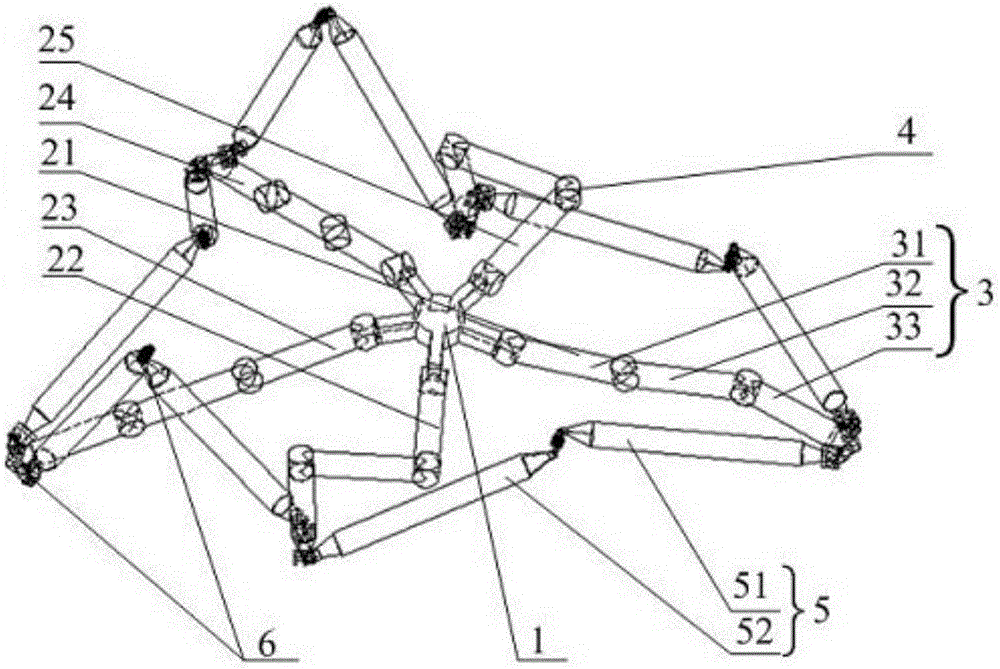
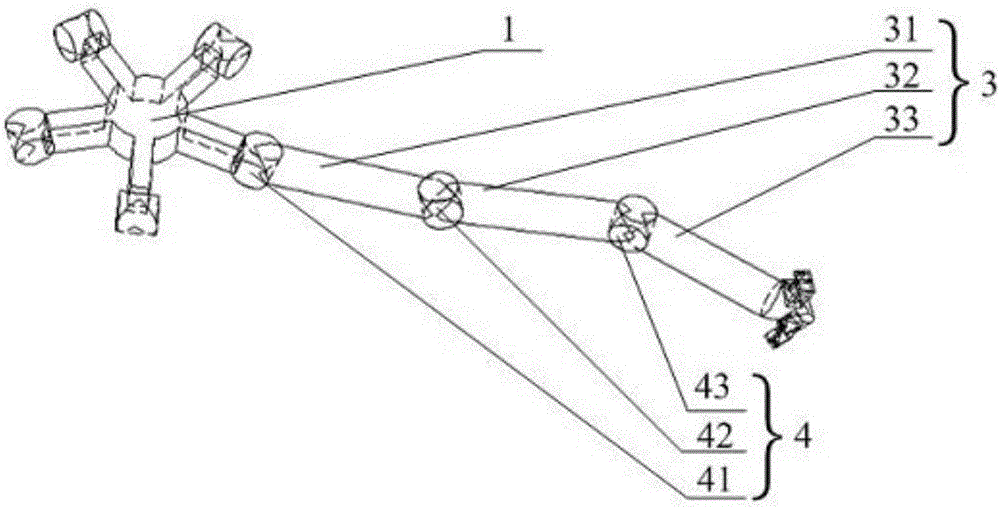
[0034] On the one hand, the present invention provides a kind of foldable parallel mechanism of bionic starfish movement, such as Figure 1-4 As shown, including moving platform 1, where:
[0035] The first kinematic branch chain 21, the second kinematic branch chain 22, the third kinematic branch chain 23, the fourth kinematic branch chain 24 and the fifth kinematic branch chain 25 are evenly and sequentially connected around the moving platform 1, and each kinematic branch chain is active. drive branch chain;
[0036] Each motion branch chain all comprises at least 3 transmission rods 3 connected in sequence, and transmission rod 3 comprises first transmission rod 31, second transmission rod 32 and the 3rd transmission rod 33, between moving platform ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com