Passive vibration absorption elastic component for flexible robot joints
A technology of robot joints and vibration damping elasticity, which is applied in the field of robots, can solve problems such as large volume, complex structure, and poor reliability, and achieve the effect of small volume, light weight, and reliable work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
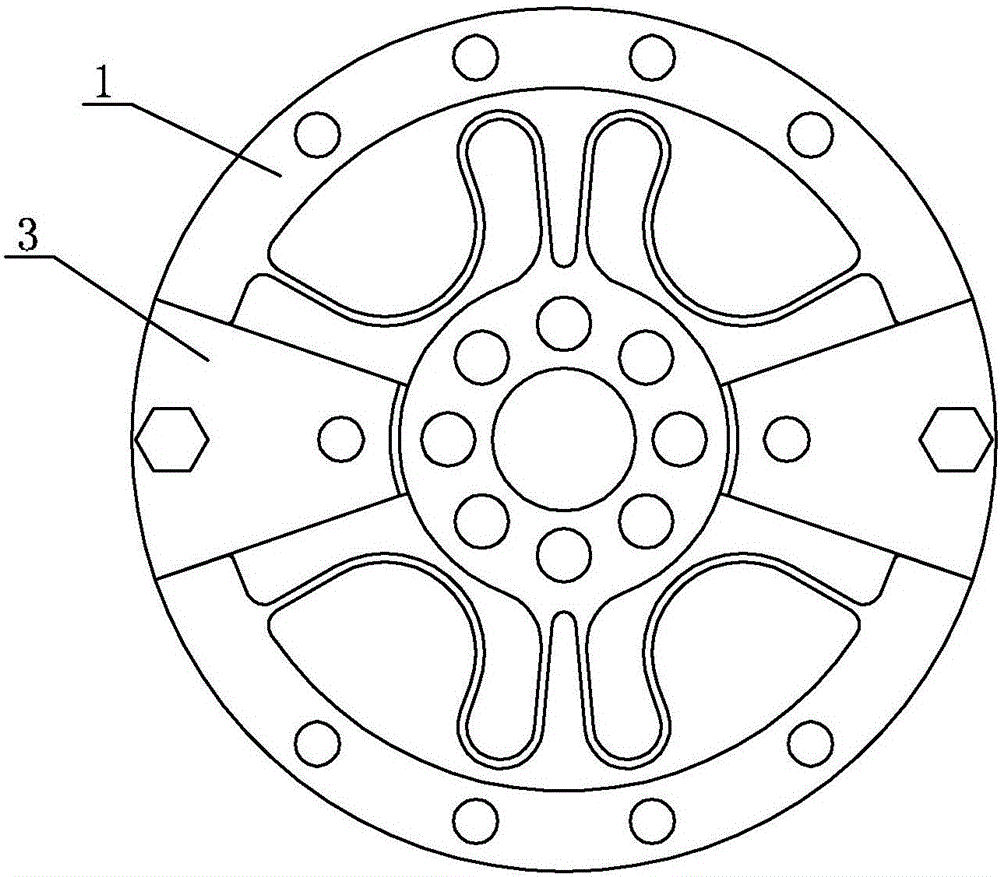
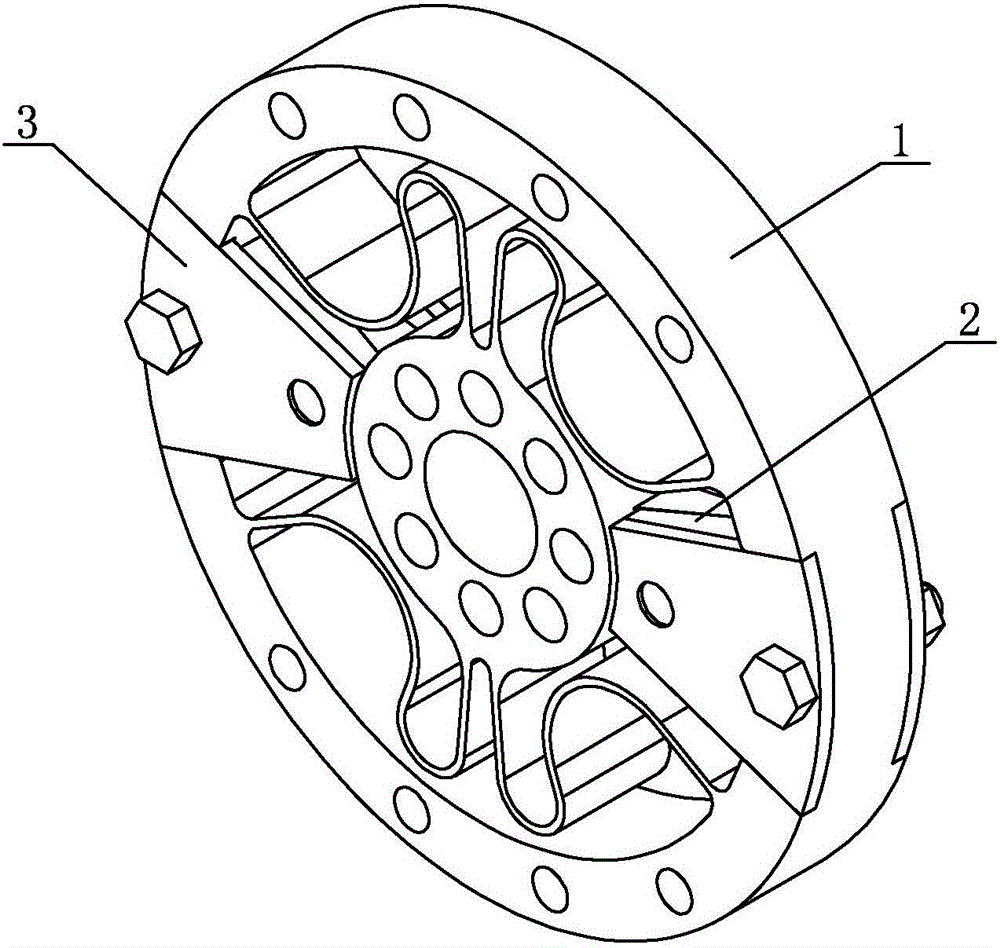
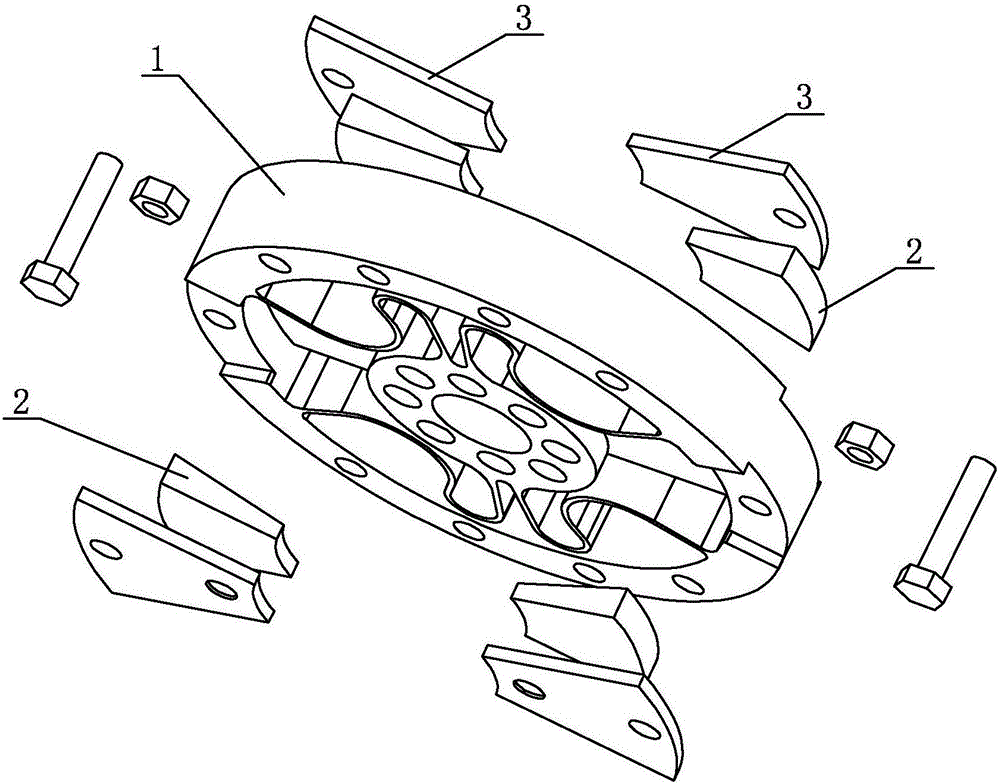
[0015] Specific implementation mode one: combine Figure 1 to Figure 6 Describe this embodiment, this embodiment includes a circular metal body 1, four fan-shaped rubber plates 2 and four fan-shaped metal connecting plates 3, the metal material body 1 is composed of an inner ring rigid body 1-1, an outer ring rigid body 1-2, two A flexible body 1-3 and two fan-shaped rigid sheets 1-4, each flexible body 1-3 is composed of two convex-concave curved rigid sheets 1-3-1, two convex-concave curved rigid sheets 1-3-1 The vertical center line N-N is symmetrically arranged, the outer ring rigid body 1-2 is coaxially arranged with the inner ring rigid body 1-1, and the two flexible bodies 1-3 and two fan-shaped rigid pieces 1-4 are arranged between the outer ring rigid body 1-2 and the inner ring rigid body 1-2. Between the inner ring rigid body 1-1, two fan-shaped rigid bodies 1-4 are arranged symmetrically on the left and right ends of the inner ring rigid body 1-1, and the inner dia...
specific Embodiment approach 2
[0016] Specific implementation mode two: combination Figure 4 and Figure 5 To describe this embodiment, the inner ring rigid body 1-1, the outer ring rigid body 1-2, the two flexible bodies 1-3 and the two fan-shaped rigid pieces 1-4 of this embodiment are integrated. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0017] Specific implementation mode three: combination figure 1 To describe this embodiment, the inner ring rigid body 1-1 of this embodiment is provided with a plurality of inner ring connecting through holes 1-1-1. A plurality of inner ring connecting through holes 1-1-1 are used for connecting the output shaft of the motor. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com