A Control Method of Three-axis Inertially Stabilized Platform Based on Model Reference Adaptive Neural Network
A technology of neural network and stable platform, applied in adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
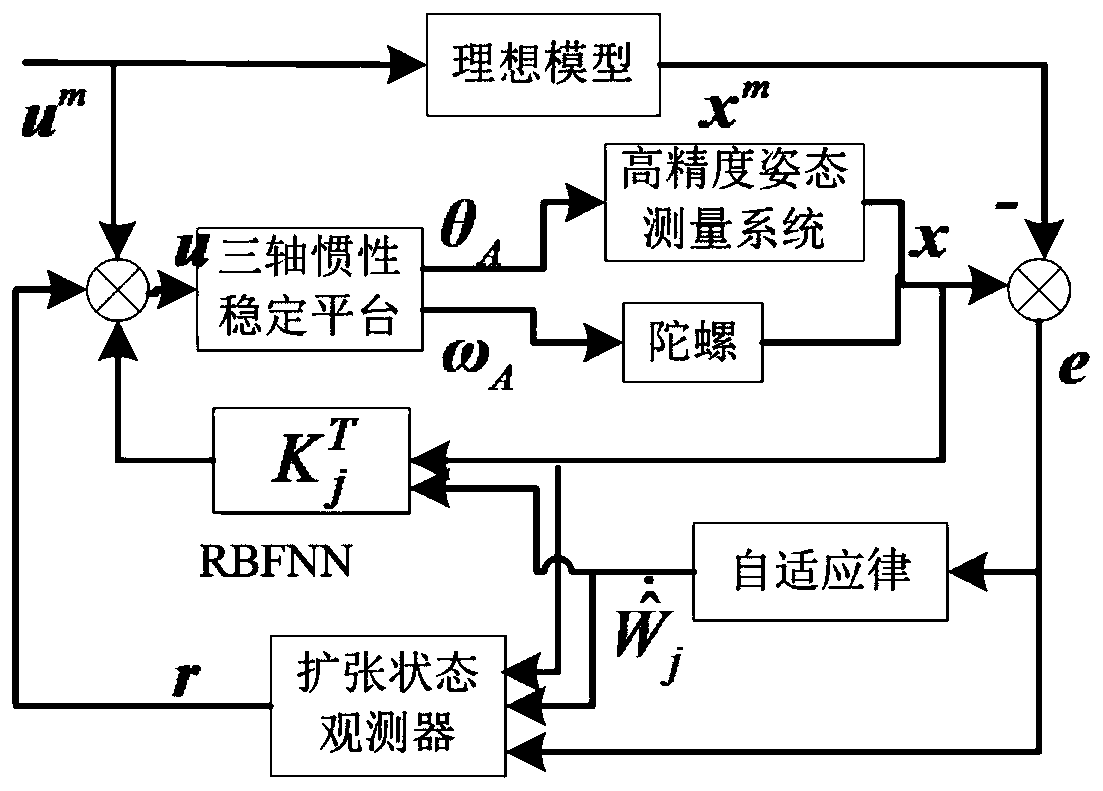
[0061] Such as figure 1 Shown, the concrete realization of the present invention is as follows
[0062] (1) Build a model-based reference adaptive neural network
[0063] Based on the Newton-Euler equation, the dynamic equation of the three-axis inertial stabilized platform is expressed as
[0064]
[0065] Among them, x=[θ j ω j ] T , H=0 3×3 , F=(f jk ),j,k=1,2,3,
[0066] u=[u 1 u 2 u 3 ] T , g=[g 1 g 2 g 3 ] T , d=[d 1 d 2 d 3 ] T ,
[0067] Among them, when j=1, it represents the roll frame, when j=2, the pitch frame, and when j=3, it represents the azimuth frame, is the state variable of the system, n=6 is the dimension of the state variable, θ j is the corresponding j-frame angle, ω j is the corresponding j-frame angular velocity, is the coefficient matrix of the state variables, The coefficient matrix input for the framework, m=3 is the dimension of the system input, u j is the corresponding j frame voltage input, g is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com