Flexible underwater operation mechanical arm with adjustable buoyancy force
An underwater operation and adjustable technology, applied to underwater operation equipment, manipulators, program-controlled manipulators, etc., can solve the problems of poor flexibility, bulky structure, and inapplicability, and achieve flexible posture, good flexibility, and simple structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
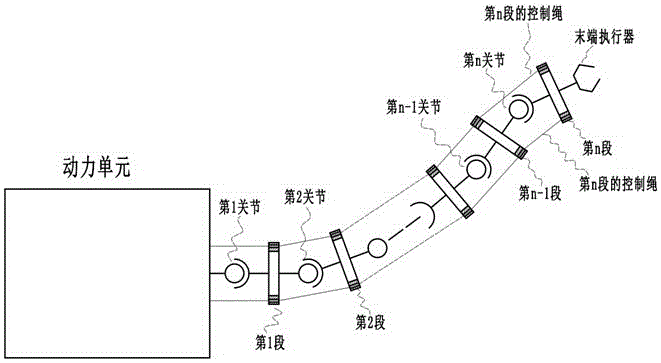
[0017] like figure 1 As shown, the present invention is composed of a manipulator body and a power unit: the manipulator body is composed of many sections, and two adjacent sections are connected by joints formed by universal joints or spherical joints, and the movement of each section is driven by a control rope; The knuckle is connected with the power unit, and the nth segment (the last segment) is fixedly connected with the final actuator. The control rope is driven by a motor, and when the control rope is pulled, the angle of each segment changes, thereby controlling the overall posture. The motor, its control system, power supply, etc. are all installed in the power unit.
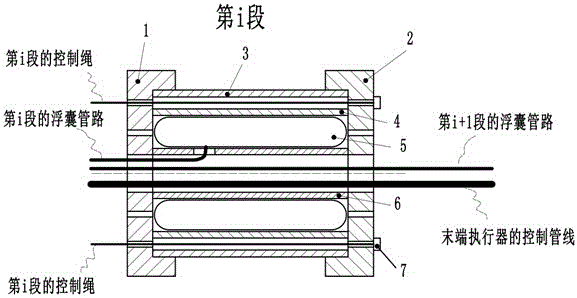
[0018] Each section of the manipulator is composed of a front end cover 1, a rear end cover 2, an outer shell 3, an inner shell 4, a floating bag 5 and an inner cylinder 6. The front end cover 1 and the rear end cover 2 are installed on both ends of the outer shell 3 respectively to form a hollow cavi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com