Obstacle avoidance device for unmanned aerial vehicle and its method for obstacle avoidance
An unmanned aerial vehicle and obstacle avoidance technology, applied in the field of unmanned aerial vehicles, can solve the problems that unmanned aerial vehicles cannot effectively avoid obstacles and have strict requirements for obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
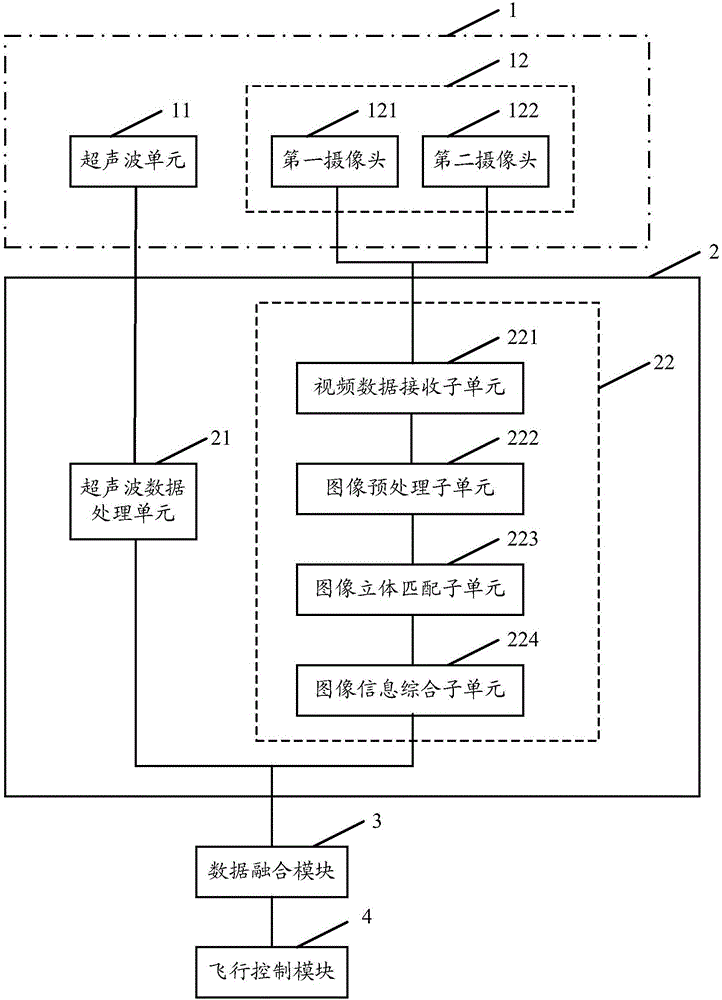
[0033] An embodiment of the present invention provides a UAV obstacle avoidance device, such as figure 1 As shown, the UAV obstacle avoidance device includes: a detector module 1, an information processing module 2, a data fusion module 3 and a flight control module 4 connected in sequence; wherein, the detector module 1 includes an ultrasonic unit 11 and a binocular vision unit 12. Both the ultrasonic unit 11 and the binocular vision unit 12 are connected to the information processing module 2. Exemplarily, the ultrasonic unit 11 can be connected to the information processing module 2 through a serial peripheral interface.
[0034] The ultrasonic unit 11 and the binocular vision unit 12 are used to simultaneously obtain obstacle information, and the obstacle information obtained by the ultrasonic unit 11 and the obstacle information obtained by the binocular vision unit 12 are transmitted to the information processing module 2; the information processing module 2 is used for ...
Embodiment 2
[0059] An embodiment of the present invention provides an obstacle avoidance method for a UAV, using the UAV obstacle avoidance device in Embodiment 1 of the present invention to avoid obstacles, specifically, as figure 2 As shown, the UAV obstacle avoidance method includes:
[0060] Step S1, using the ultrasonic unit and the binocular vision unit to obtain obstacle information simultaneously.
[0061] Step S2, processing the obstacle information obtained by the ultrasonic unit to obtain obstacle distance information, and processing the obstacle information obtained by the binocular vision unit to obtain obstacle depth information.
[0062] Step S3, fusing obstacle distance information and obstacle depth information to obtain comprehensive obstacle information, and transmitting the comprehensive obstacle information to the flight control module, so that the flight control module controls the UAV to avoid obstacles according to the comprehensive obstacle information.
[0063]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com