A crawler-type wall-climbing robot that can steer freely
A wall-climbing robot and crawler-type technology, applied in manipulators, manufacturing tools, etc., can solve problems such as not being able to meet the needs of working conditions, and achieve the effect of eliminating steering difficulty, improving obstacle-surmounting ability, and improving usage scenarios.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
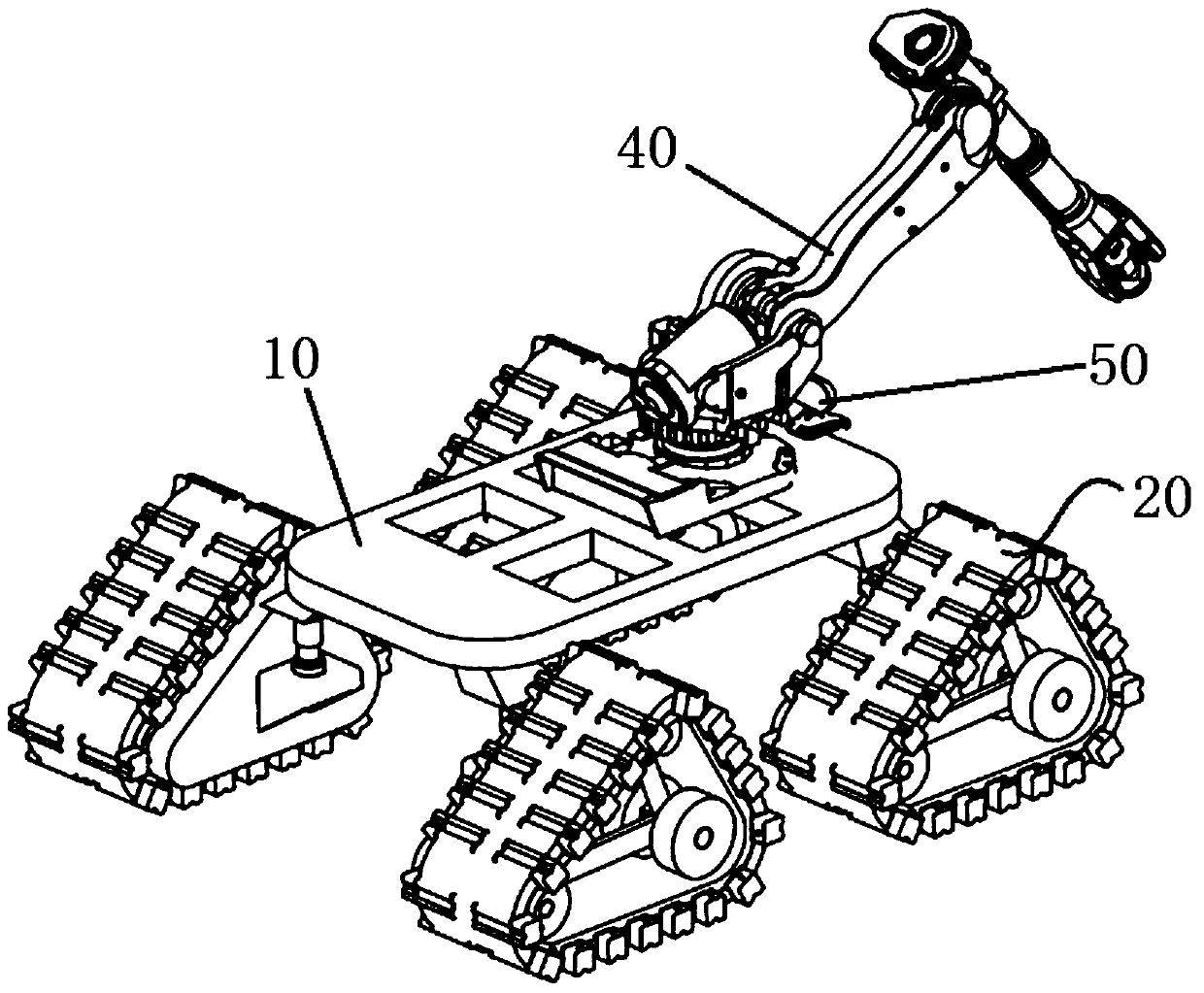
[0022] Such as figure 1 As shown, the present invention includes a frame 10, the frame 10 is a rectangular frame structure, and a crawler assembly 20 is respectively arranged at the four corners of the frame 10 to realize the adsorption and walking of the present invention on a vertical wall. A mechanical arm 40 is installed on the top of the frame 10 for performing actions such as cleaning, rust removal, painting and testing on the wall surface.
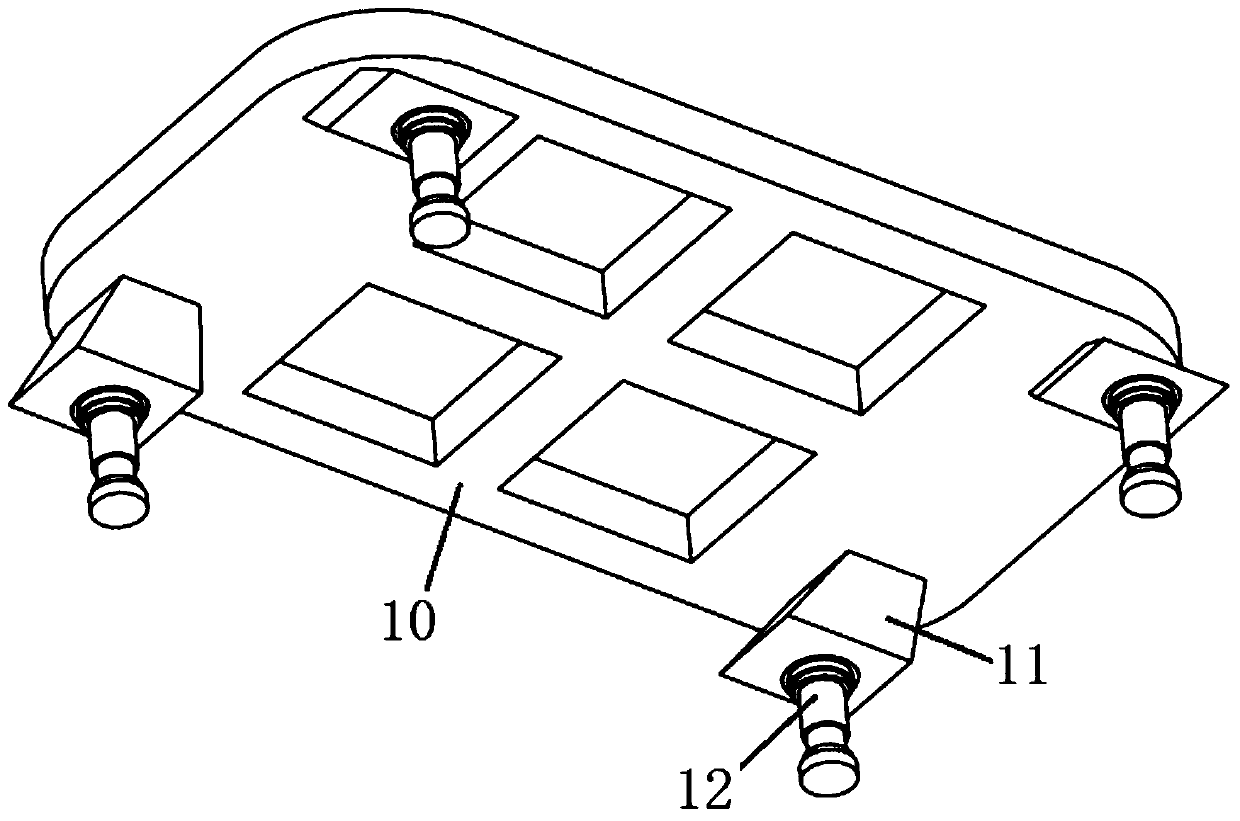
[0023] Such as figure 2 As shown, four steering motors 11 are arranged at the bottom of the frame 10 , the output end of each steering motor 11 is tightly connected to a telescopic cylinder 12 , and the output end of the telescopic cylinder 12 is tightly connected to a crawler belt assembly 20 .
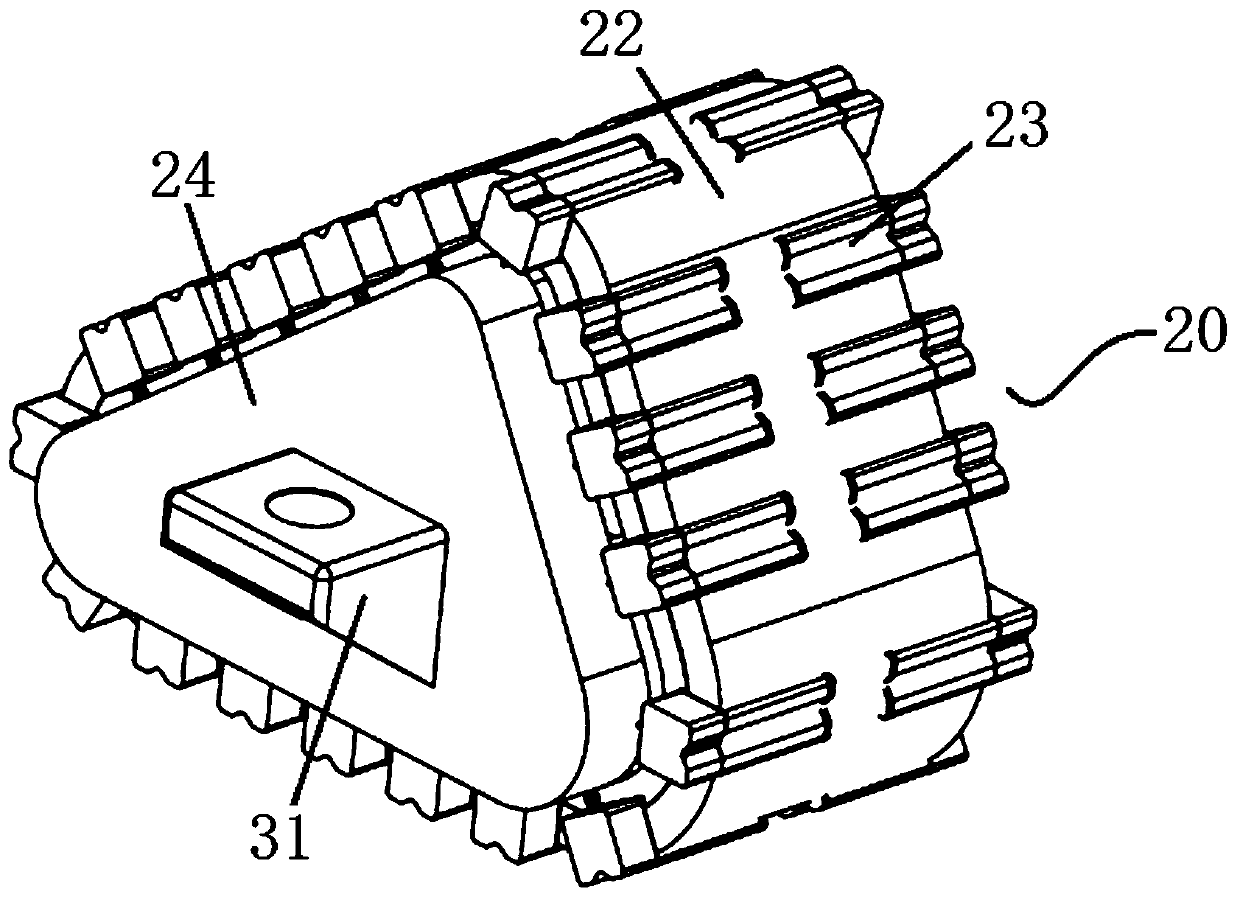
[0024] Such as image 3 , Figure 4 As shown, the track assembly 20 includes a chain rail 21 , a rubber tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com