A Construction Handling Robot Based on 3-ups Parallel Mechanism
A technology for handling robots and building construction. It is applied in the direction of manipulators, manufacturing tools, and program-controlled manipulators. It can solve the problems of low handling efficiency, many hidden dangers of dangerous accidents, and physical injuries of construction personnel, and achieves easy walking and high flexibility. , good shock absorption performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
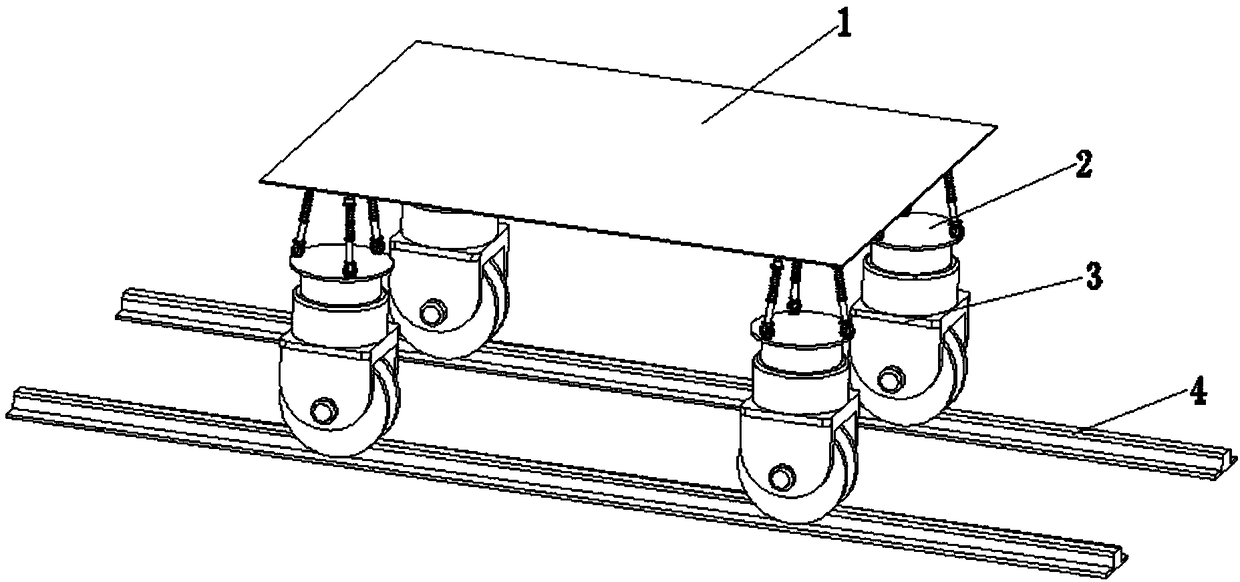
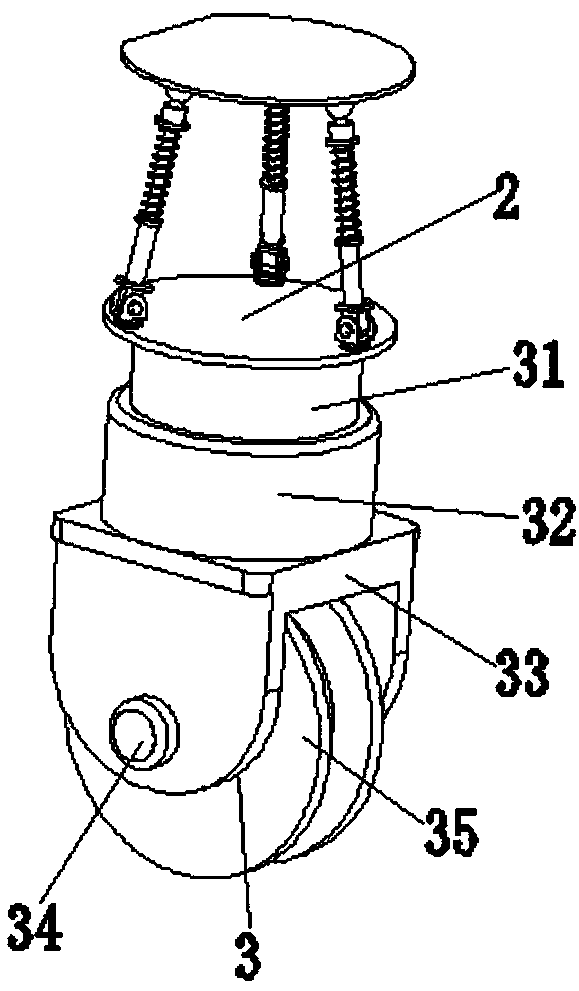
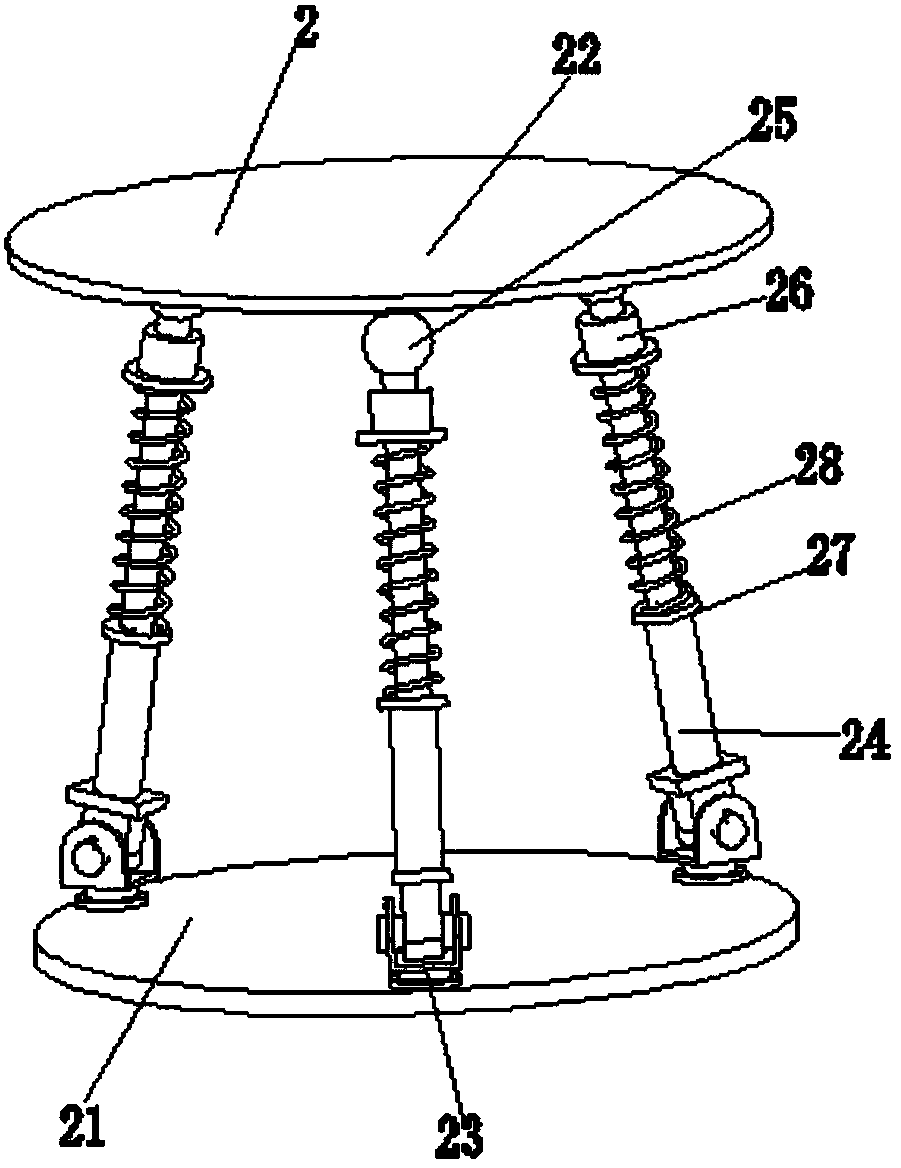
[0016] Such as Figure 1 to Figure 3 As shown, a building construction handling robot based on the Stewart parallel mechanism includes a handling platform 1, a three-degree-of-freedom parallel vibrating table 2, a traveling device 3 and a track 4, and the number of the three-degree-of-freedom parallel vibrating table 2 and the traveling device 3 is Four; the carrying platform 1 is a rectangular plate structure, and the material of the carrying platform 1 is 45 steel materials, and the three-degree-of-freedom parallel vibrating table 2 is respectively located at the four corners of the carrying platform 1, and the three-degree-of-freedom parallel vibrating table 2 and The bottom end surfaces of the transport platform 1 are connected by bolts, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com