High-altitude-airship horizontal position control method based on characteristic model
A technology of feature model and control method, applied in the field of aircraft control, can solve the problem of weak controllable system without strong interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
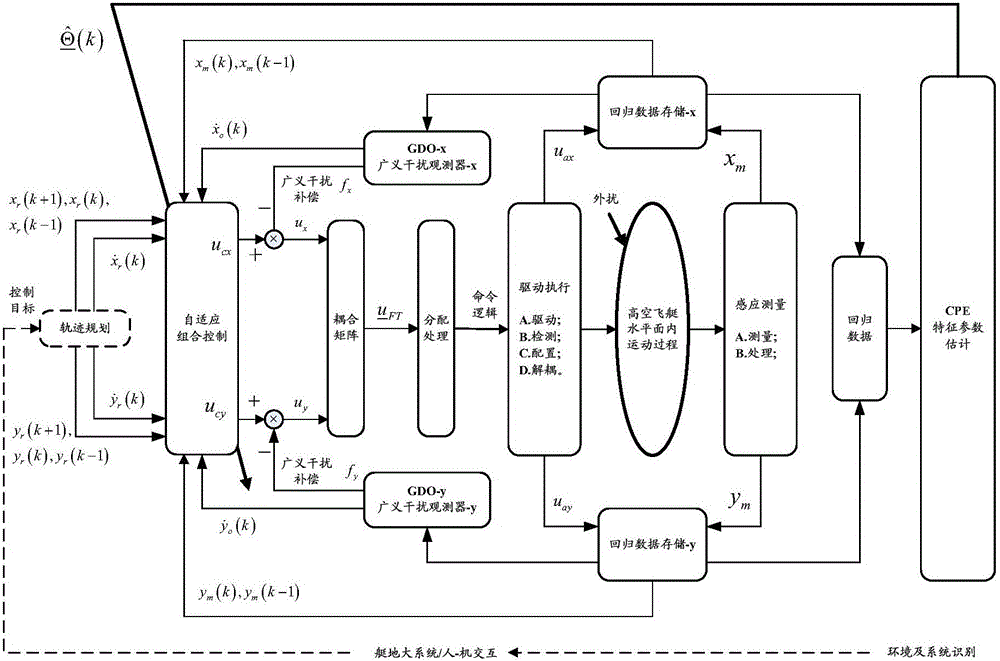
[0049] figure 2 The contents shown in the dotted line and the dotted frame (including carrying out human-computer interaction according to the environment and system identification information, and carrying out trajectory planning by the control target given by the large system loop of the ship) do not belong to the content scope of the present invention, and are expressed in figure 2 In order to more clearly illustrate the extension relationship of the technology of the present invention.
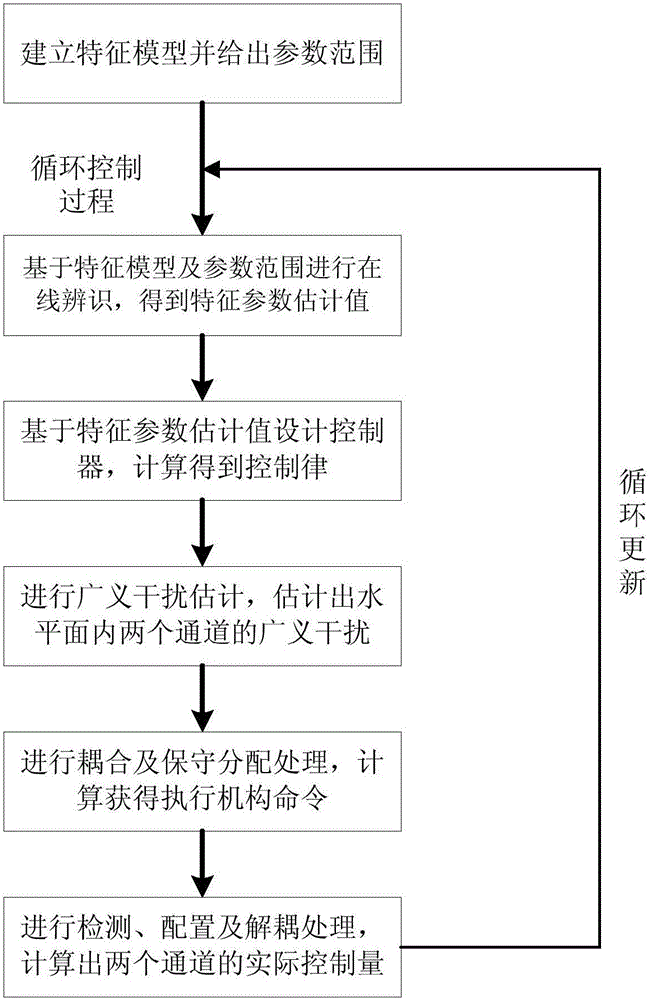
[0050] Such as figure 1 Shown is the method flow chart of the present invention, specifically described below:
[0051] [1] Based on the analysis of the motion model of the high-altitude airship in the horizontal plane, the characteristic model is established and the parameter range is given.
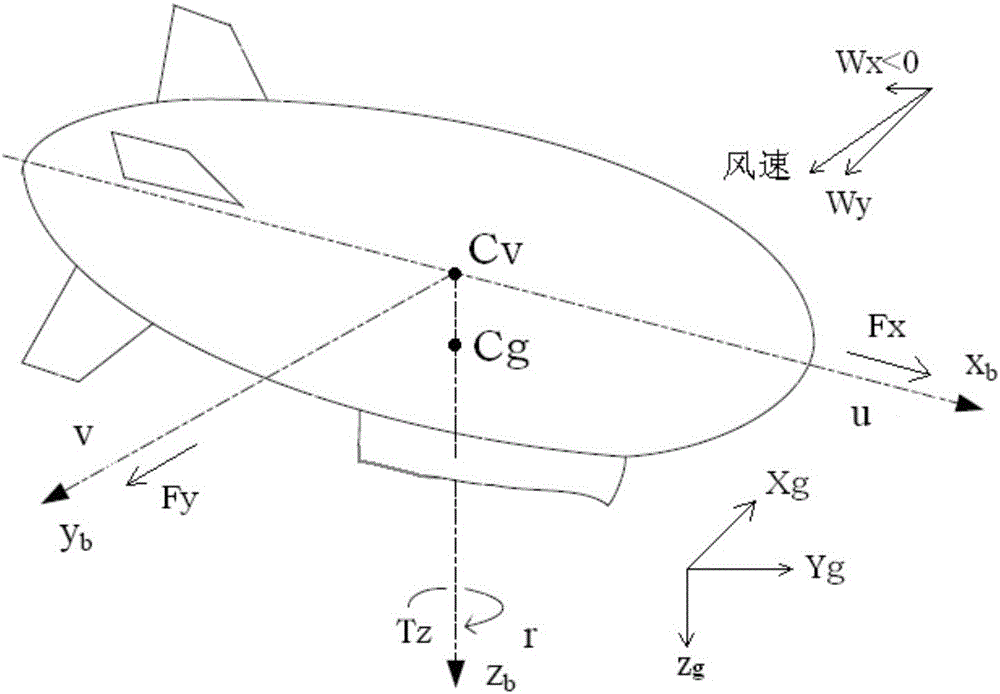
[0052] Such as image 3 , establish a ground coordinate system x with a reference point on the ground as the origin g the y g z g (generally, x g axis points east, y g Axis points north, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com