Autonomous mobile robot and control method thereof
A technology of autonomous movement and control methods, applied to machine parts, manual floor scrubbing machinery, etc., can solve problems such as inability to judge, fragile, broken wires, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical scheme of the present invention is described in detail below in conjunction with the embodiment shown in the accompanying drawings:
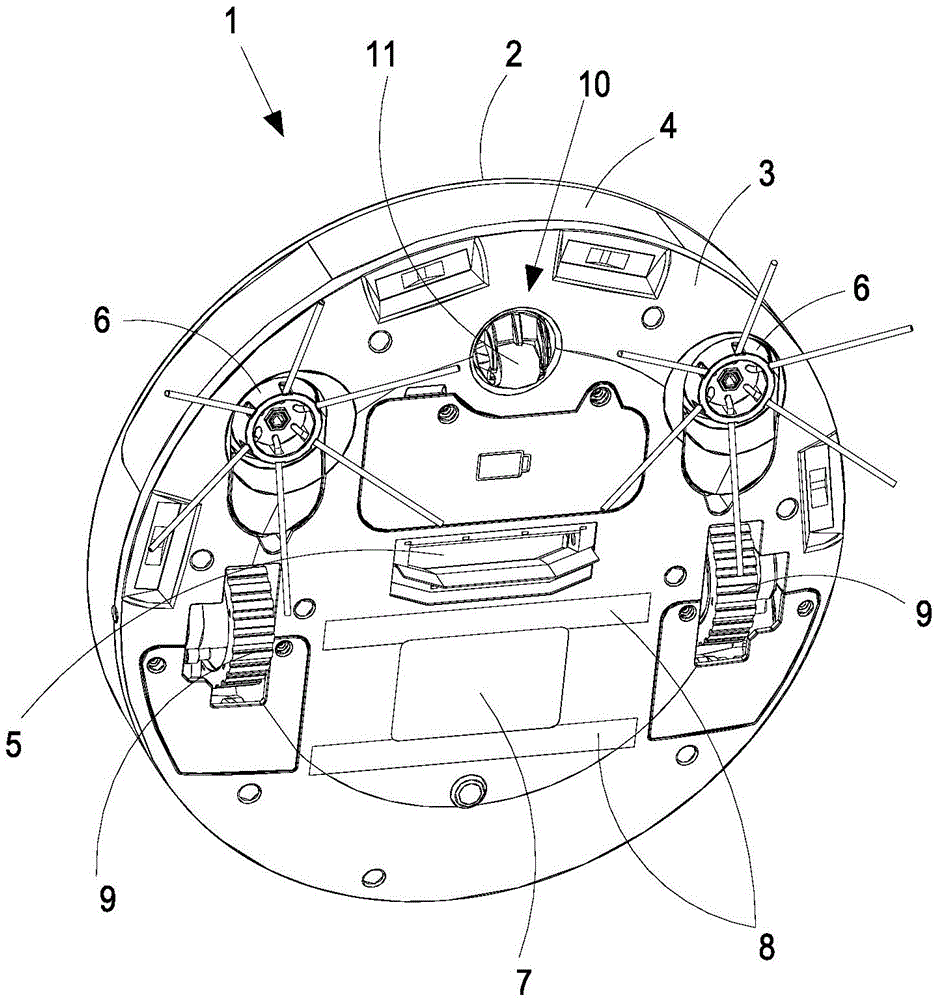
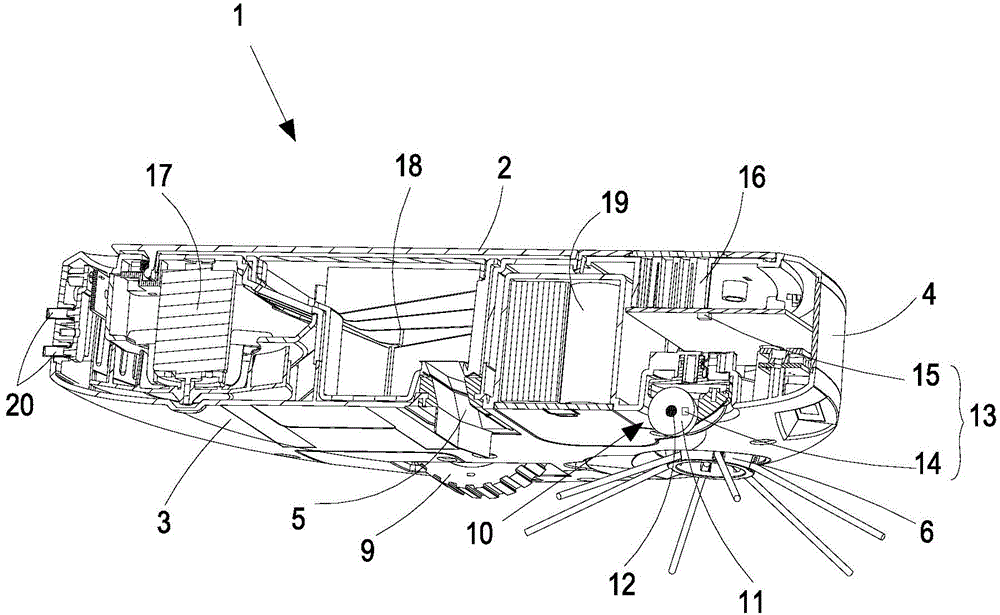
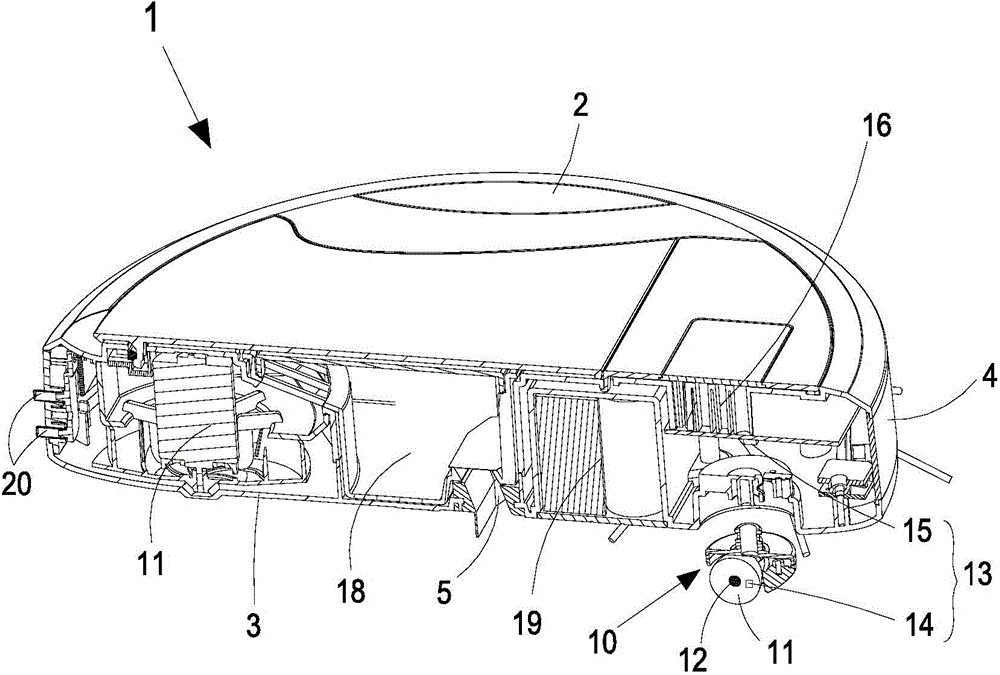
[0035] What this embodiment enumerates is a kind of self-moving floor cleaning robot, such as Figure 1~3 As shown, the self-moving floor cleaning robot has a robot body 1 capable of moving back and forth and rotating on the ground to be cleaned, and the robot body 1 has a shell made of a top wall 2, a bottom wall 3 and an outer peripheral side wall 4 body.
[0036] The robot body 1 is provided with a cleaning unit 7 for removing dirt on the ground to be cleaned during the movement of the robot body 1 . In this example, the cleaning unit is composed of a dust suction module, a mop cleaning module and a sponge cleaning module. Wherein, the dust collection module includes a dust collection motor 17 arranged inside the robot body 1, a dust suction port 5 provided on the bottom wall 3, a dust collection box 18 and a filter com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com