A Variable Impedance and Event-Based Haptic Feedback Control Method
A control method and tactile feedback technology, applied in the fields of robot control, virtual reality technology, and tactile interaction technology, can solve the problems of patient injury, doctors' inability to judge and make decisions, and high grinding and drilling speed, so as to achieve real-time control guarantee , Strong practical value, small calculation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
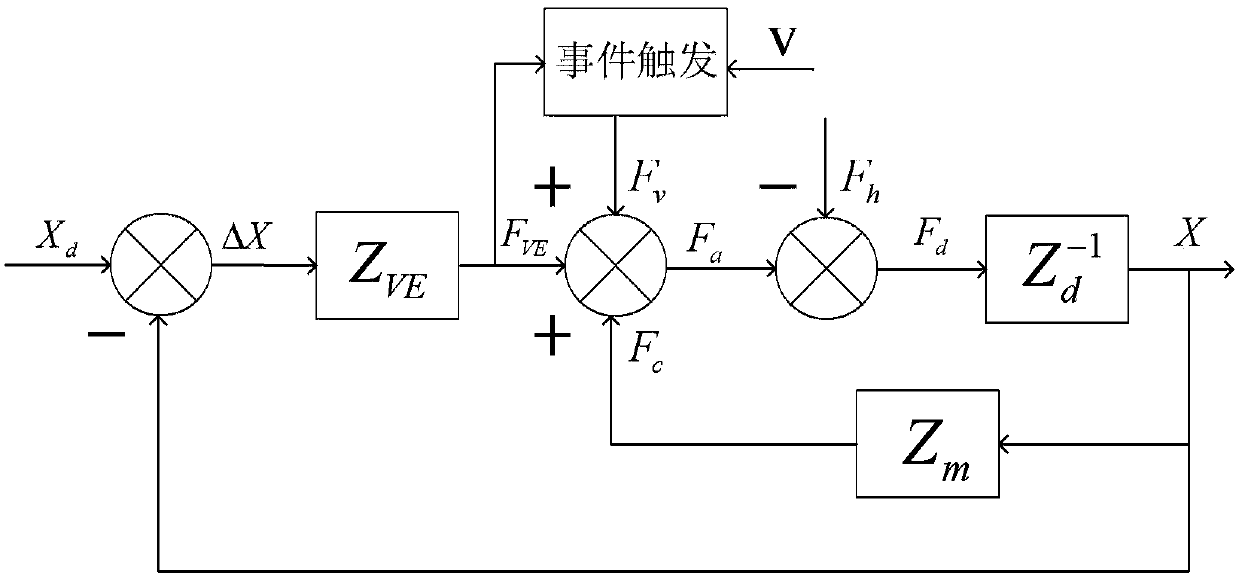
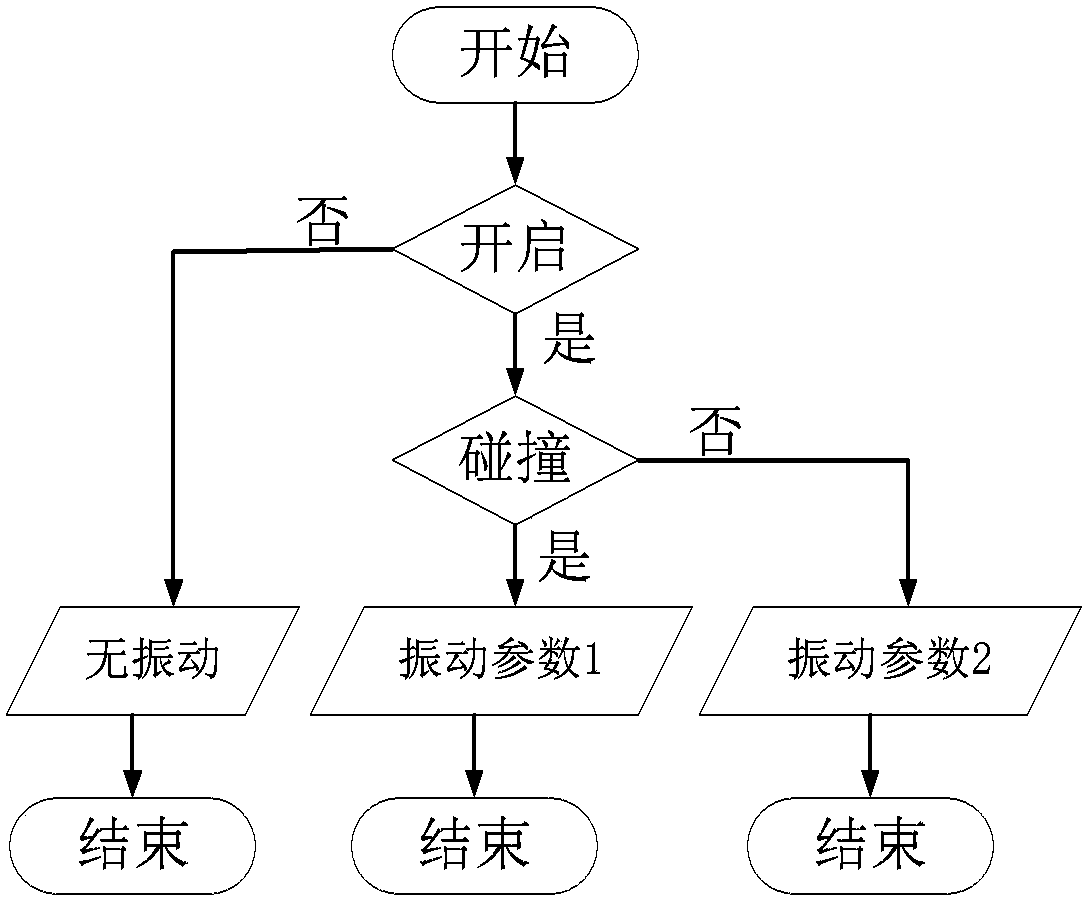
[0016] The invention proposes a variable impedance and event-based tactile feedback control method. In this method, the dynamic model of the force feedback device is first established, and the compensation force / torque of the force feedback device is calculated; then, the biomechanical properties of the bone structure are adjusted according to the real-time interaction state between the grinding drill and the bone structure in the surgical simulation , that is, the stiffness and damping of the impedance function, from which the interaction force in the virtual environment is calculated; finally, the vibration amplitude and frequency are determined according to the corresponding event signals in the surgical simulation, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com