Traveling mechanism, mechanical structure of inspection robot and obstacle crossing method of mechanical structure
A line inspection robot and walking mechanism technology, applied in the field of robotics, can solve the problems that transmission line obstacles cannot be crossed, and continuous inspection of ultra-high voltage transmission lines cannot be realized, so as to achieve enhanced stability, reduced labor intensity, and reduced operating costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
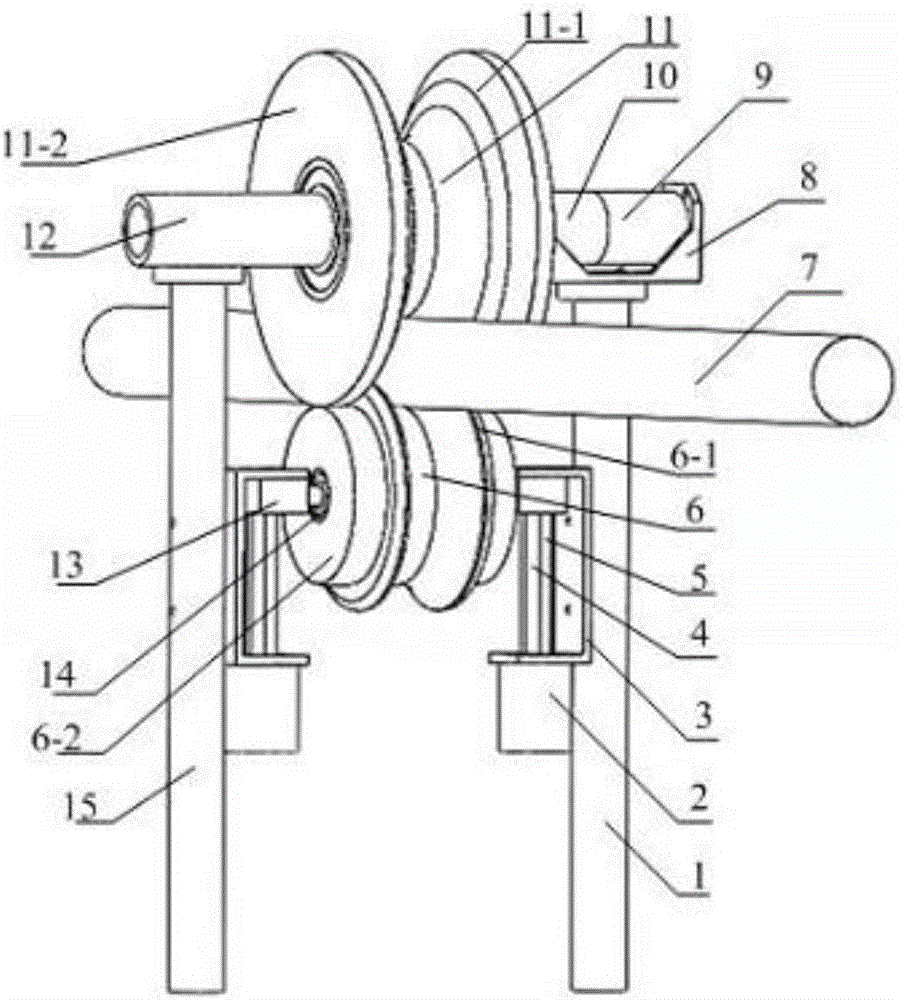
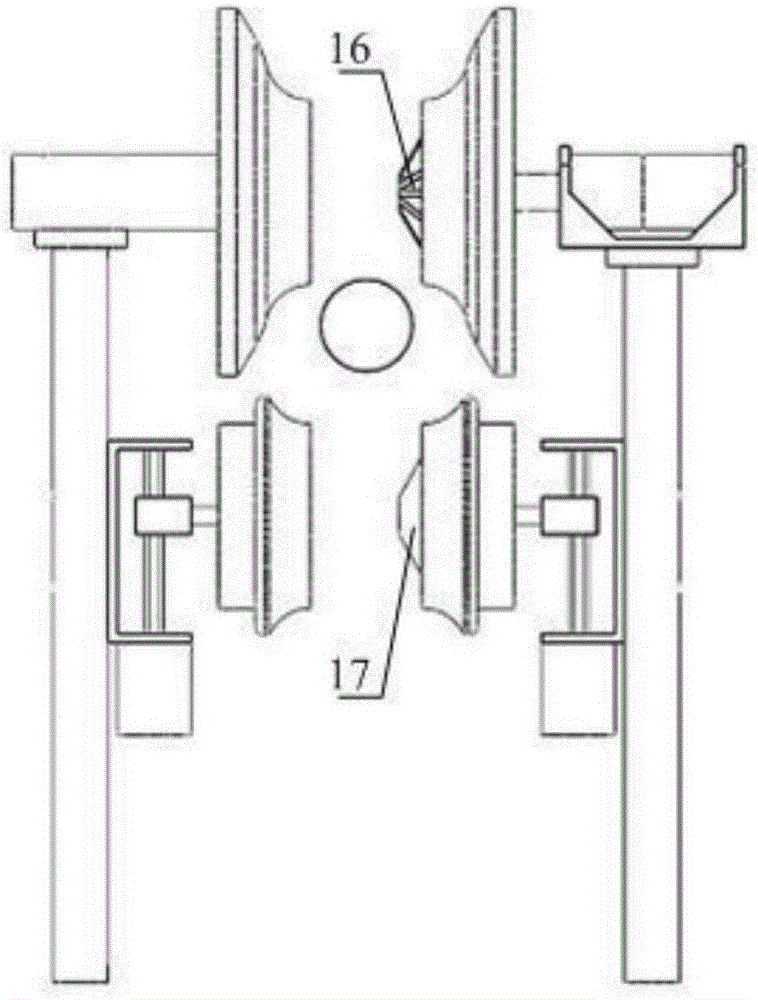
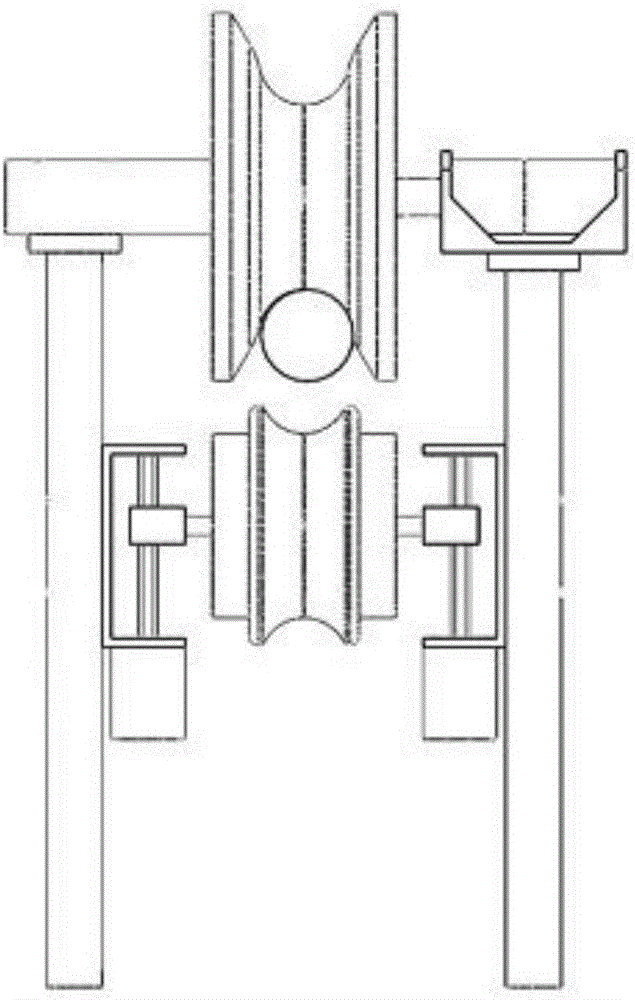
[0024] On the one hand, the present invention provides a kind of traveling wheel and clamping wheel combined traveling mechanism, such as figure 1 As shown, including at least one walking unit, wherein:
[0025] The walking unit comprises a pair of walking split wheels 11, and the walking split wheels 11 include active walking split wheels 11-1 and passive walking split wheels 11-2 that can be docked and separated from each other, active walking split wheels 11-1 and A first traveling wheel arm 1 and a second traveling wheel arm 15 are respectively provided below the passive traveling splitting wheel 11-2;
[0026] A pair of clamping and splitting wheels 6 that can be lifted and lowered to cooperate with the clamping circuit 7 is arranged below the walk...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com