Optical guiding recovery system of autonomous underwater robot and recovery method of optical guiding recovery system
An underwater robot and recovery system technology, which is applied to underwater operation equipment, instruments, image data processing and other directions, and can solve problems such as the inability to meet the needs of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in further detail below in conjunction with the accompanying drawings.
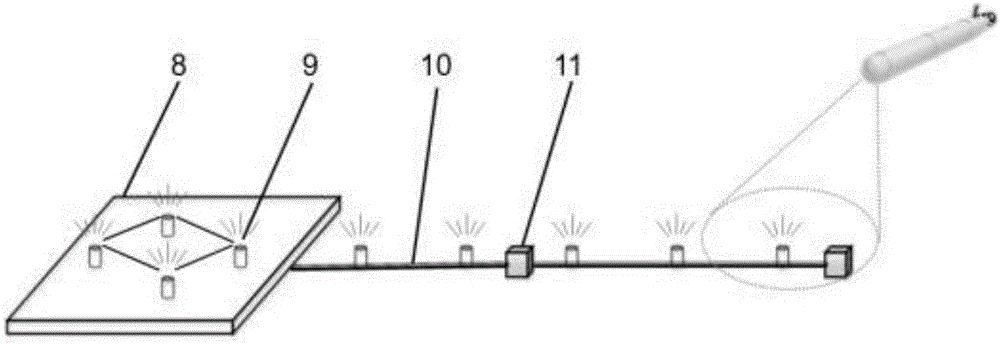
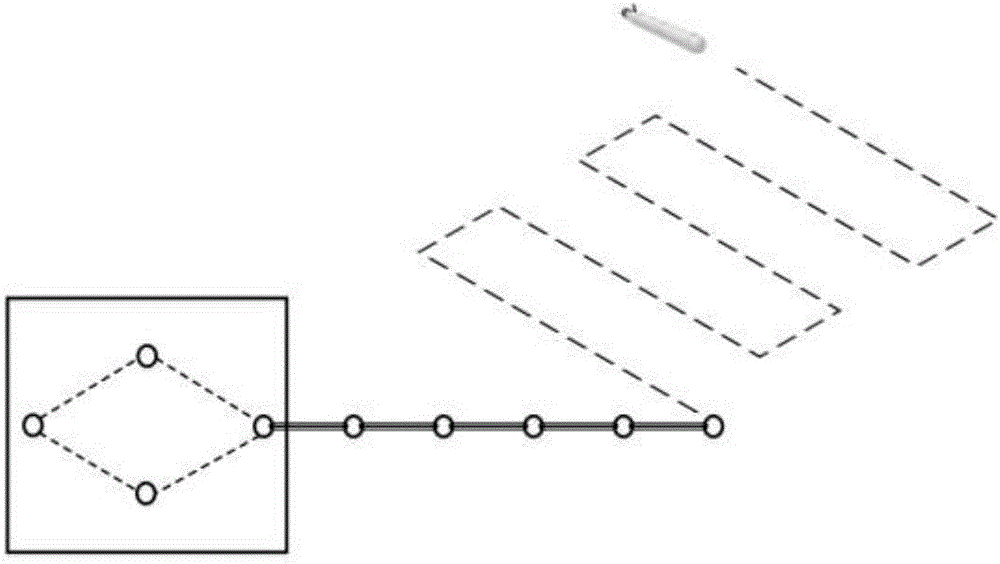
[0066] The purpose of the present invention is to provide a recovery method for an autonomous underwater robot guided by a linear light source array, aiming at the limited guidance distance, low success rate, poor reliability and susceptibility to environmental factors in the existing underwater docking recovery system However, this method enables the autonomous underwater robot to achieve high reliability, high robustness, and high success rate of underwater autonomous recovery, and theoretically, the effective guidance distance that meets the application requirements can be obtained by increasing the length of the light source array.
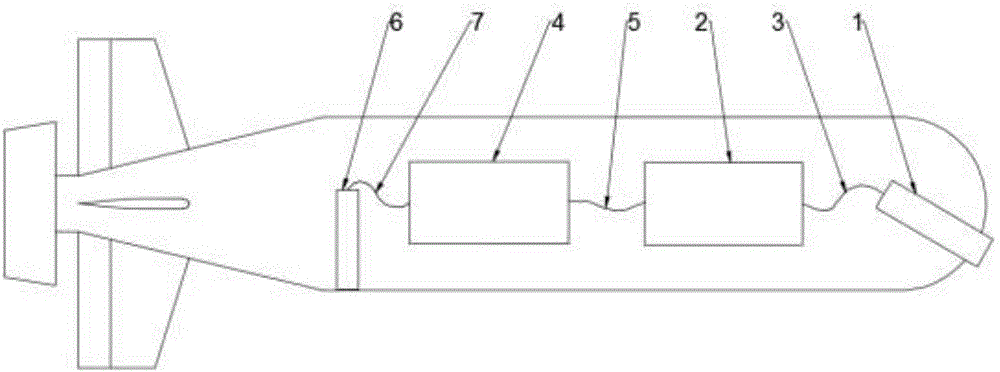
[0067] The main components of the optically guided recovery system for autonomous underwater vehicles include:
[0068] (1) Underactuated autonomous underwater robot with typical rudder-wing joint control, with an optical cam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com