Network synchronous control method of robot cluster cooperation tasks
A task network and synchronous control technology, applied in electrical components, time-division multiplexing systems, multiplexing communications, etc., can solve problems such as second-level errors, delays, inaccurate and unified actions, and time delays, and achieve Improve the accuracy and success rate, solve application difficulties, and shorten the effect of time delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
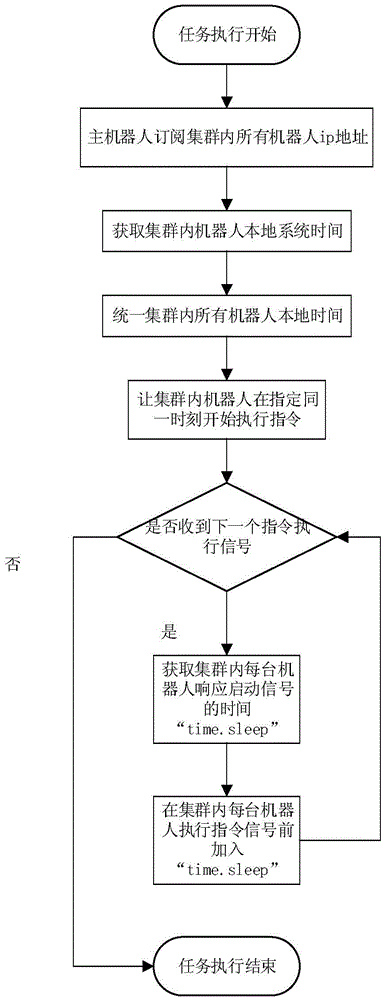
[0025] A method for synchronous control of a robot cluster cooperative task network, comprising the following steps:
[0026] 1) Computer-side programming:
[0027] Write a python script in the python development environment of the computer, and the action program executed by the robot runs on the computer;
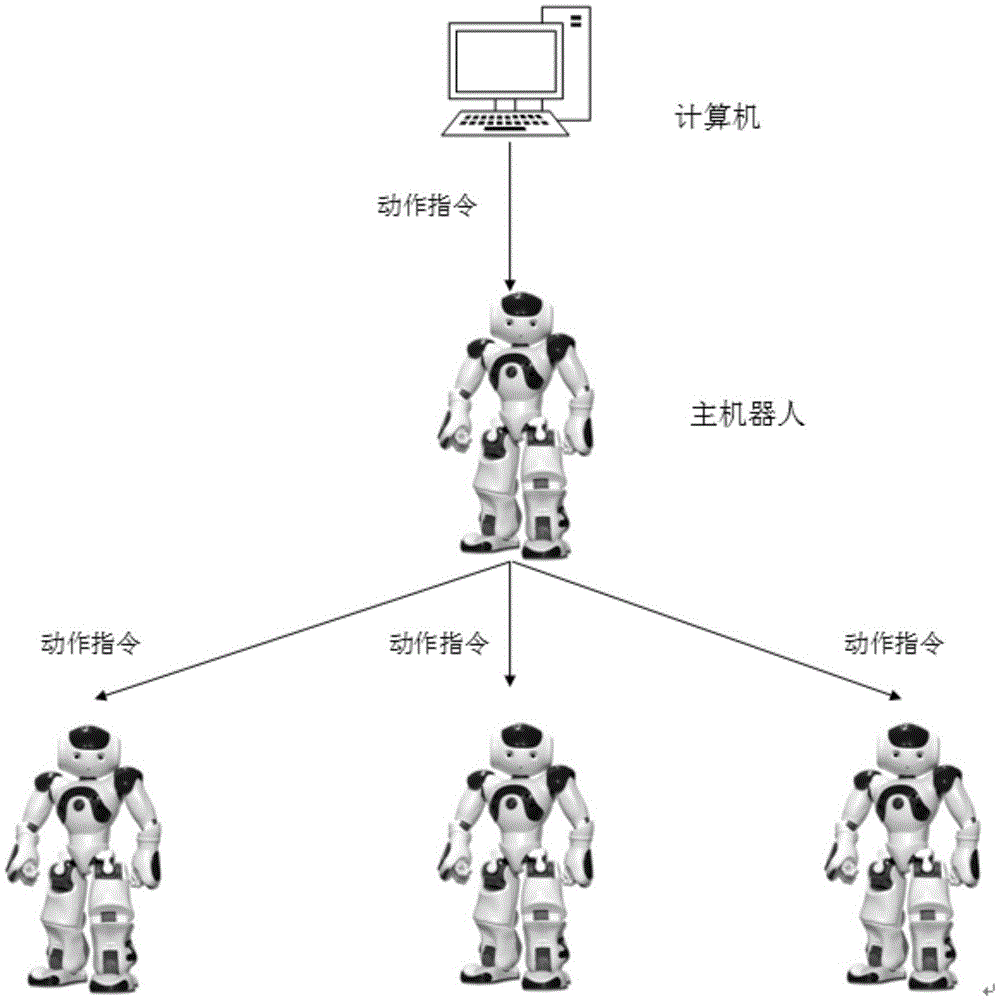
[0028] 2) Control method of master robot and slave robot:
[0029] The main robot and the choregraphe box in the slave robot respectively write robot python scripts corresponding to the python script, and the master robot subscribes to the ip addresses of all slave robots in the network. Subsequent task instructions are transmitted from the master robot to the slave robot; usually, if the computer side directly controls multiple robots in the cluster, due to network delays, it is easy to cause too large a time gap for each robot to receive task instructions, and the master robot sends instructions to the slave robot. Passing can greatly reduce the time difference betwee...
Embodiment 2
[0042] The control method for synchronous operation of robots as described in Embodiment 1 is different in that the robot is a NAO robot.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com