Evading method based on same direction sailing of virtual puffed motion obstacle and UUV
A movement obstacle and obstacle technology, which is applied in the avoidance of movement obstacle and UUV co-navigation based on virtual puffing, can solve problems such as difficulty in accurately predicting the movement state of movement obstacle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
[0025] Embodiment 1: A method for avoiding movement obstacles based on virtual puffing and UUV sailing in the same direction includes the following steps:
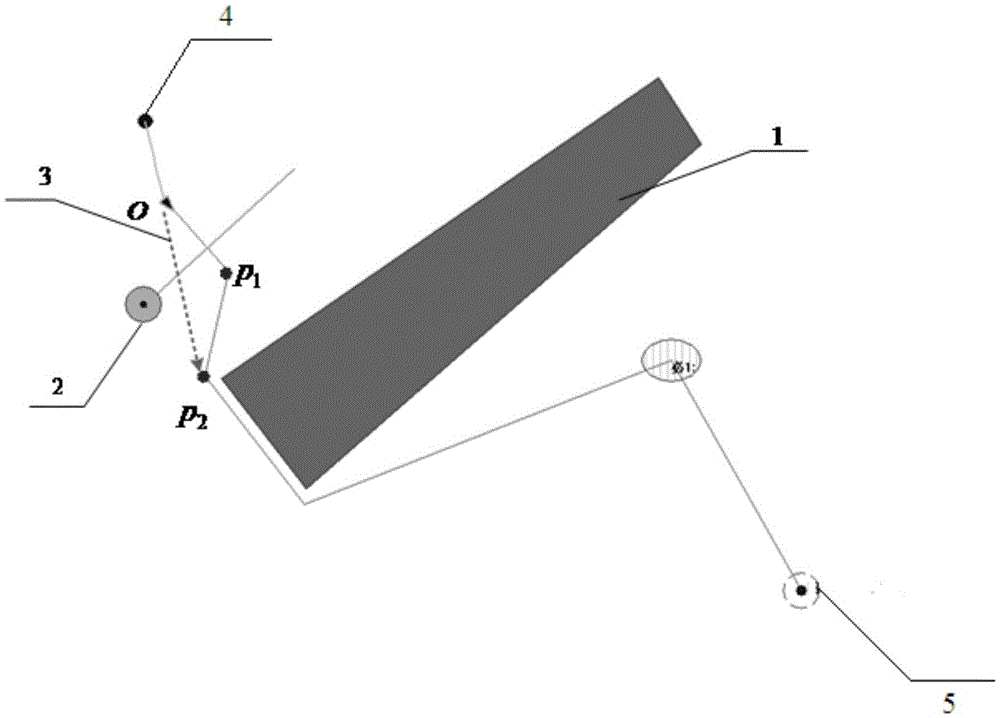
[0026] The guidance direction refers to the direction of the vector formed by the line from the current position of the UUV to the next non-motion obstacle waypoint. The so-called non-movement obstacle waypoint means that the waypoint is not formed by relying on the movement obstacle, but is the vertex of the static environment information in the environment, such as the vertex of the static target (p 2 ), necessary points, recycling points, etc. When the UUV runs to figure 1 At the position shown, when the No. 1 motion obstacle is encountered, the UUV triggers the dynamic programming algorithm to form a new avoidance route, point p 1 is the waypoint formed by the UUV to avoid the No. 1 movement obstacle and relies on the movement obstacle, and the point p 2 is the static target puffed vertex. So according to the defi...
specific Embodiment approach 2
[0032] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in the second step, the method for determining the two positional relationships of UUV chasing dyskinesia and UUV chasing dyskinesia is as follows:
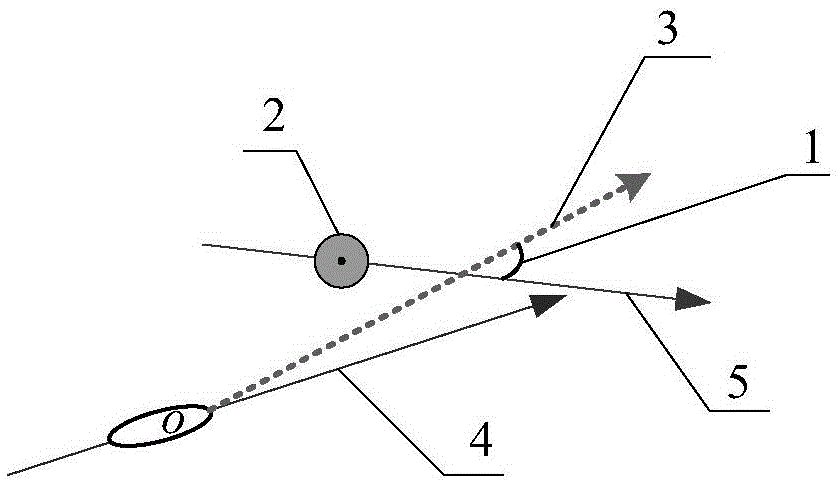
[0033] when when, such as image 3 As shown, it is UUV chasing motion obstacles; when when, such as Figure 4 As shown, it is a motion obstacle pursuit UUV.
[0034] image 3 and Figure 4 The size of the dotted circle outside the middle movement obstacle is the perception radius of the UUV. When the UUV is within the circle, the corresponding movement obstacle is detected by the UUV. The pursuit judgment line 1 divides the possible position of the UUV into two parts according to the forward direction of the movement obstacle. When the UUV is on the back side, it is the UUV chasing the movement obstacle, and when it is on the front side, it is the movement obstacle chasing UUV; the pursuit judgment line is the movement ob...
specific Embodiment approach 3
[0035] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that in Step 3, puffing and rectangular virtual obstacles are used to adjust the heading of the UUV, and the process of avoiding movement obstacles is as follows:
[0036] When the UUV is chasing a motion obstacle in the rear, by image 3 It can be seen that as long as the straight-line distance from the UUV to the movement obstacle M≥R, the UUV is safe. Since the speed and relative position of the UUV and the target are random within a certain range, motion obstacles may not necessarily affect the movement of the UUV, so it is unnecessary to trigger planning as soon as the target is found. The solution designed by the present invention is that if the UUV is chasing after the movement obstacle, when the straight-line distance from the UUV to the movement obstacle is M≤C (C is a constant, generally taken as 2R to 3R), it is considered that the movement obstacle has an impact on the navigation of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com