


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Electric unmanned plane and cruising ability estimating method thereof
A technology of electric drones and drones, which is applied in the field of drones and can solve problems such as inaccuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0050] Embodiment 1. An electric drone.
[0051] As mentioned in the above background technology, once the power shortage occurs during the flight of the electric drone, it will be very dangerous and may directly lead to a crash. Therefore, it is very important to accurately judge the battery life, but the existing battery life judgment method is too simple, and only gives warning information based on the analysis of battery remaining capacity, flight distance or instantaneous power. However, in the actual flight process, the energy consumption of electric drones is not static. It is neither objective nor intuitive to judge only by flight distance or instantaneous power.
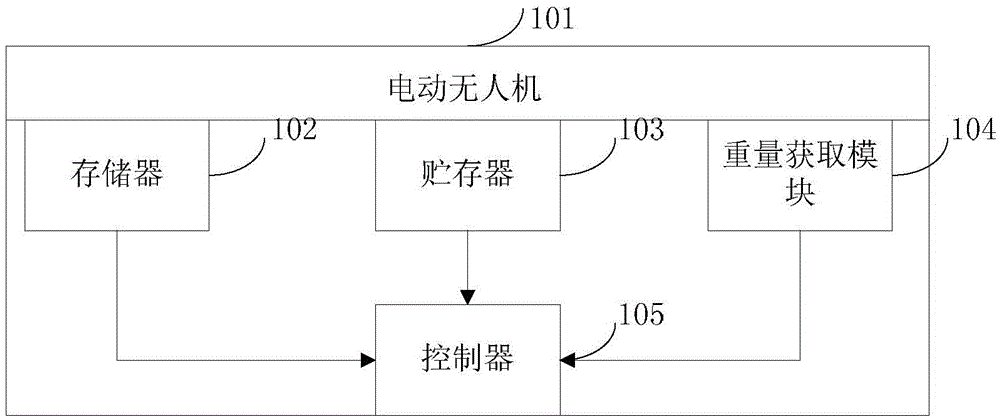
[0052] figure 1 It is a schematic structural diagram of an electric drone according to Embodiment 1 of the present invention, and this embodiment of the present invention will combine figure 1 Be specific.
[0053] like figure 1 As shown, the embodiment of the present invention provides an electric drone...
Embodiment 2
[0103] Embodiment 2, an electric drone.
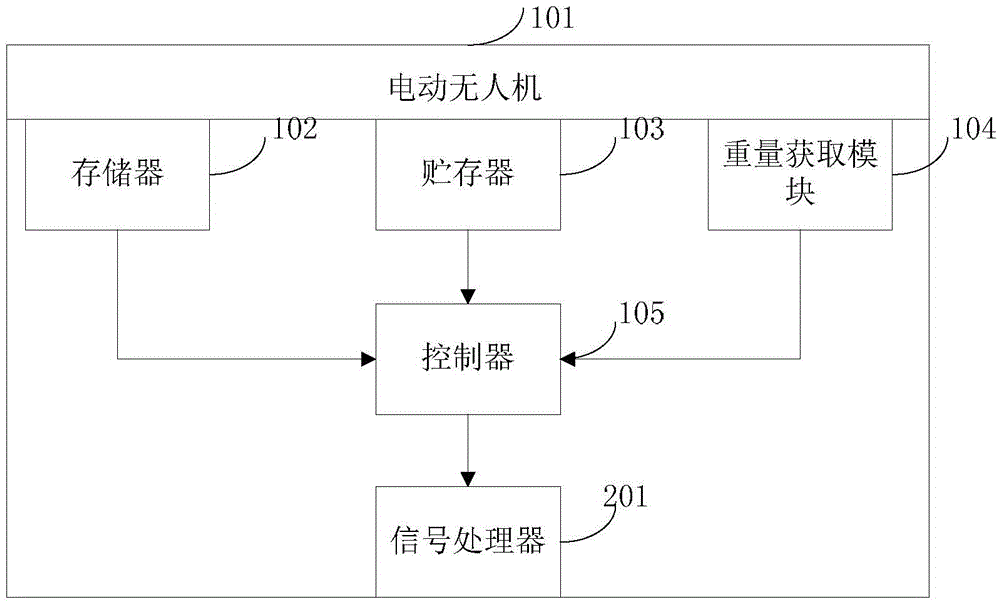
[0104] figure 2 It is a schematic structural diagram of the electric drone in Embodiment 2 of the present invention, and the embodiment of the present invention will combine figure 2 Be specific.
[0105] like figure 2 As shown, the embodiment of the present invention provides an electric drone 101, including:
[0106] The memory 102 is used to store the total power of the battery of the electric drone 101 and the measurement value of the current remaining power;
[0107] The storage 103 is used to store the pre-acquired correspondence between the weight of the preset graded load and the battery life of the electric drone 101;
[0108] A signal processor 201, the signal processor 201 is connected to the controller 105, and is used to process the correspondence between the weight of the preset graded load and the battery life of the electric drone;
[0109] A weight acquisition module 104, configured to acquire the actual load w...
Embodiment 3
[0147] Embodiment 3. A method for estimating the battery life of an electric unmanned aerial vehicle.
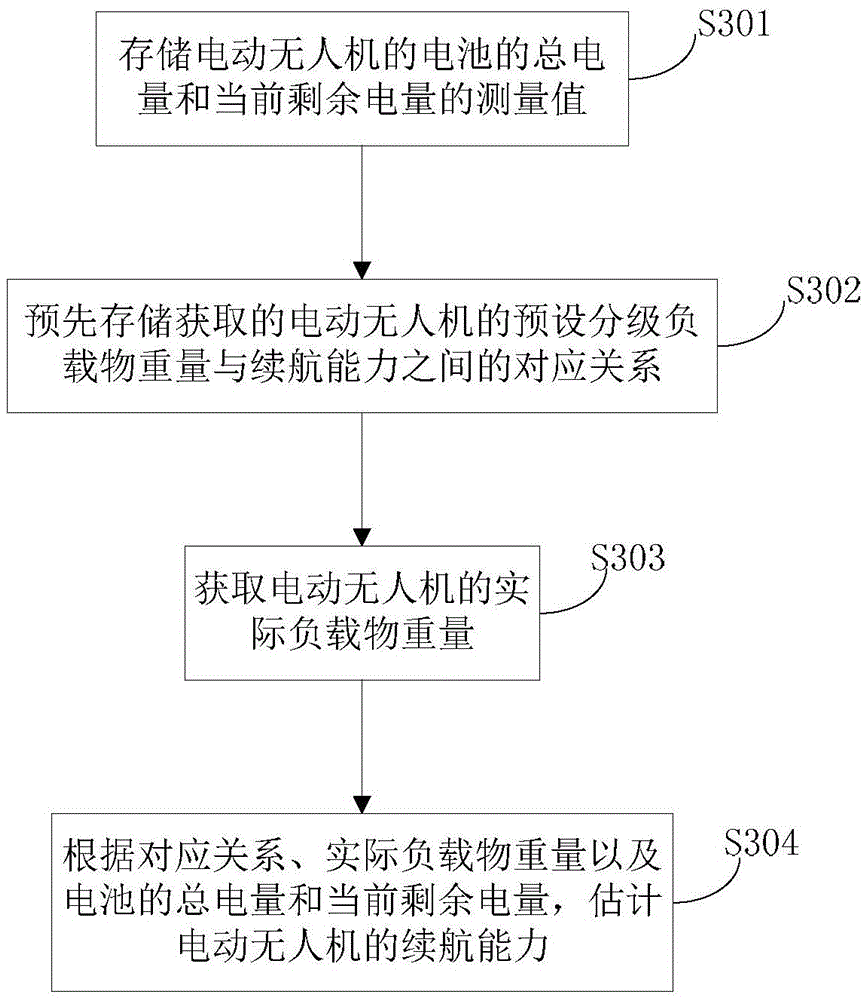
[0148] image 3 It is a flowchart of the estimation method for the battery life of the electric unmanned aerial vehicle in the third embodiment of the present invention, and the embodiment of the present invention will combine image 3 Be specific.
[0149] like image 3 As shown, the embodiment of the present invention provides a method for estimating the battery life of an electric unmanned aerial vehicle, comprising the following steps:
[0150] Step S301: storing the total power of the battery of the electric drone and the measurement value of the current remaining power;
[0151] Step S302: Pre-store the acquired correspondence between the weight of the preset graded load and the battery life of the electric drone;
[0152] Step S303: Obtain the actual load weight of the electric drone;
[0153] Step S304: Estimate the battery life of the electric drone according t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com