Wheeled leg type cockroach-shaped bio-robot
A bionic robot and wheel-leg technology, applied in the field of bionic robots, can solve the problems of being unsuitable for investigation and detection work, complicated robot gait, and low walking efficiency, and achieve the effect of compact structure, strong driving force, and high walking efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
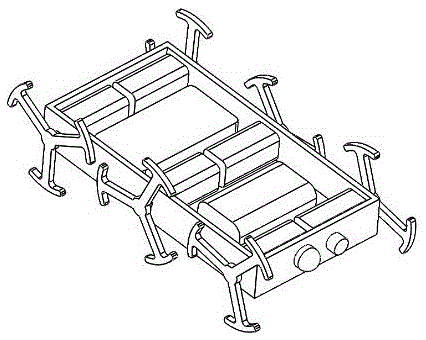
[0018] In terms of overall structural design, the present invention provides a wheel-legged cockroach-shaped bionic robot, such as figure 1 As shown, it includes a chassis 1, three pairs of wheel-leg drive structures 2, six DC motors and a planetary gear reducer 5, a wide-angle camera 3, an ultrasonic probe 4, a battery pack 6, and a wireless control module 7. Among them, the DC motor and the planetary gear reducer 5 are directly fixed on the chassis 1 by bolts, and the output shaft is connected with the wheel leg 2 for driving; the wide-angle camera 3 and the ultrasonic probe 4 are fixed on the front of the chassis 1 by screws; the battery pack 6, The wireless control module 7 is fixed on the chassis, and is connected with the motor, the camera, and the ultrasonic probe through wires.
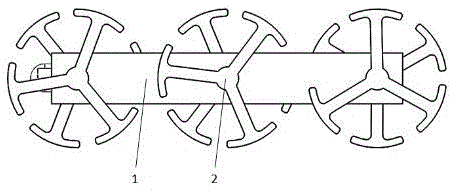
[0019] Such as figure 2 Shown is the front view of the present invention, the wheel leg 2 is a trident symmetrical structure, the surface is covered with non-slip rubber; the wheel leg and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com