Method and device for controlling lots of robots to stop emergently
A kind of robot, a large number of technologies, applied in the direction of program control manipulator, program control, safety device, etc., can solve the problems of robots colliding with each other and there is no good solution, and achieve the effect of avoiding mutual collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
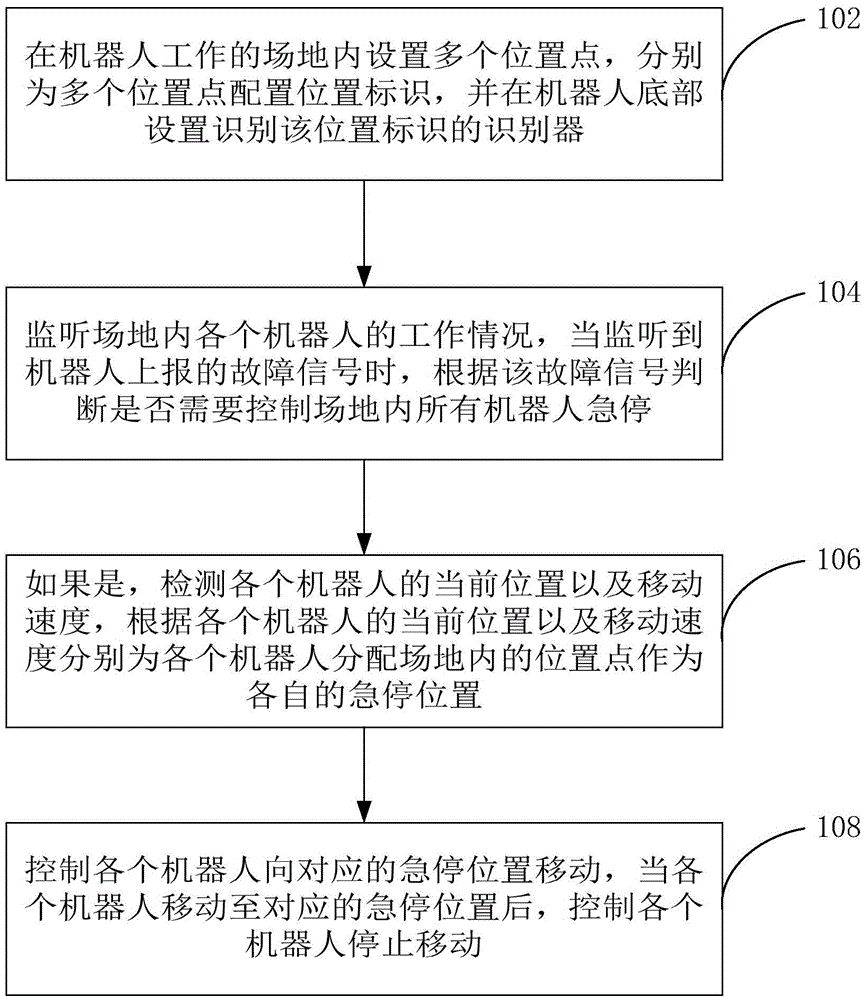
[0053] Such as figure 1 As shown, the first embodiment of the present invention provides a method for controlling a large number of robots to stop suddenly, the method at least includes the following steps:
[0054] Step 102, setting a plurality of location points in the working site of the robot, configuring location marks for the plurality of location points respectively, and setting a recognizer for recognizing the location marks at the bottom of the robot;
[0055] Step 104, monitor the working conditions of each robot in the field, and when the fault signal reported by the robot is monitored, judge whether it is necessary to control all the robots in the field to stop suddenly according to the fault signal;
[0056] Step 106, if yes, detect the current position and moving speed of each robot, and assign each robot a position point in the field as a respective emergency stop position according to the current position and moving speed of each robot;
[0057] Step 108, cont...
Embodiment 2
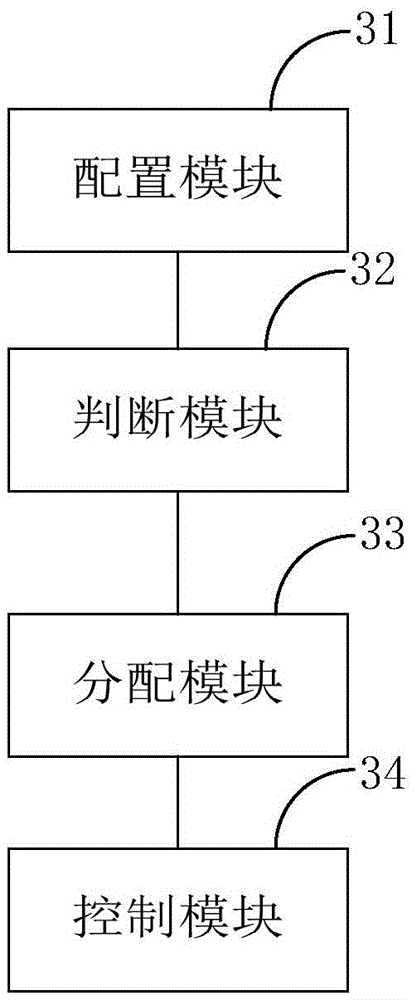
[0081] Corresponding to the above-mentioned first embodiment, the embodiment of the present invention also provides a second embodiment, an apparatus for controlling a large number of robots to stop in an emergency, for implementing the above-mentioned method. Such as image 3 As shown, the device for controlling the emergency stop of a large number of robots includes:
[0082] The configuration module 31 is used to set a plurality of location points in the working site of the robot, configure location marks for the plurality of location points respectively, and set a recognizer for recognizing the location marks at the bottom of the robot;
[0083] The judging module 32 is used to monitor the working conditions of each robot in the field, and when the fault signal reported by the robot is monitored, it is judged according to the fault signal whether it is necessary to control all the robots in the field for emergency stop;
[0084] Allocation module 33 is used for, if yes, d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com