Isomorph identification method for complex-hinge-containing kinematic chains based on topological characteristic loop codes
A technology of topological features and isomorphism recognition, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as large missing recognition, complex implementation, and poor reliability, and achieve high efficiency, fast speed, and reliability Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
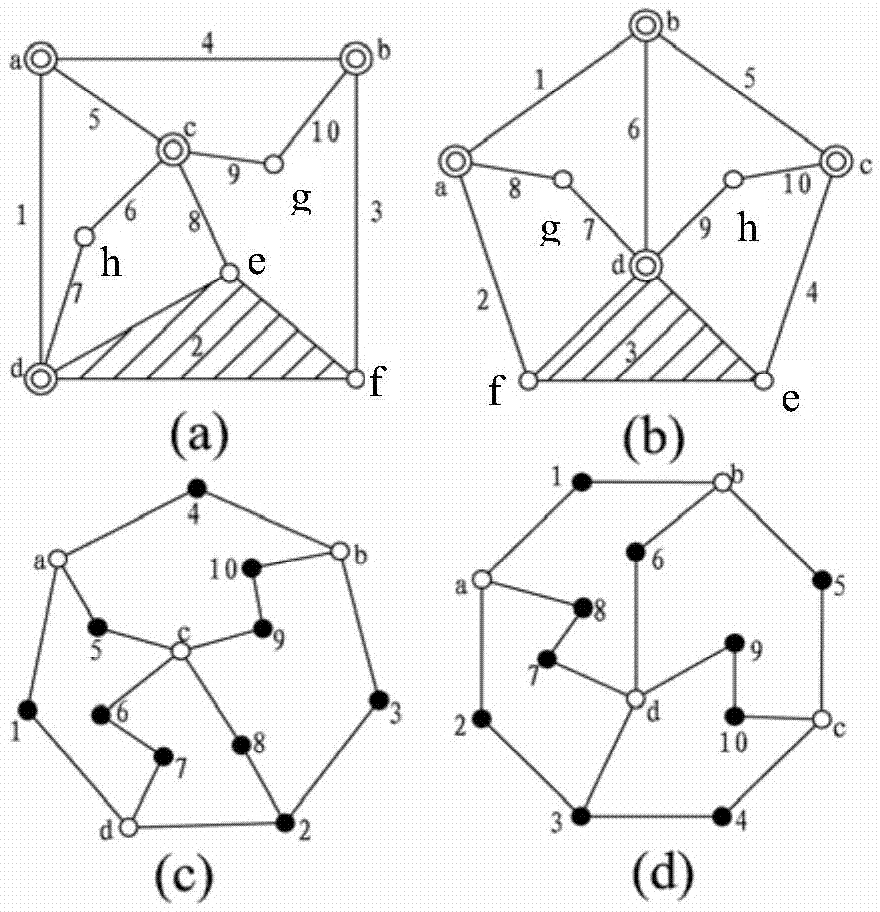
[0051] Such as figure 2 (a) and 2(b) are two kinds of 10-bar single-degree-of-freedom 4-complex hinge kinematics, and the corresponding two-color topological diagrams are 2(c) and 2(d).
[0052] (1) by A 1 And B 1 Generate the adjacency matrix A and B of the two-color topological graph of the kinematic chain:
[0053] That is by:
[0054]
[0055] Get:
[0056]
[0057] (2) Solve all the multi-degree-of-freedom vertices in the adjacency matrix A as (2, a, b, c, d);
[0058] Arrange the vertices (2, a, b, c, d) to obtain an adjacent vertex pair (2, d) first, and then directly use the depth first search algorithm to solve all paths from the vertex pair (2, d). Get all loops that meet the requirements:
[0059] L 1 :(2-3-b-4-a-5-11-6-7-d);
[0060] L 2 :(2-3-b-10-9-c-5-a-1-d);
[0061] L 3 :(2-8-c-9-10-b-4-a-1-d);
[0062] Choose to obtain the largest loop:
[0063] L 1 :(2-3-b-4-a-5-11-6-7-d);
[0064] L 2 :(2-3-b-10-9-c-5-a-1-d);
[0065] L 3 :(2-8-c-9-10-b-4-a-1-d);
[0066] (3) From the maxi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com