Improved potential grid method applied to floor cleaning robots
A sweeping robot and robot technology, applied in the field of robotics, can solve problems such as failure to reach target points, trap areas, robot vibration, etc., and achieve the effect of reducing dead nodes in the path and cleaning blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described below in conjunction with specific embodiments.
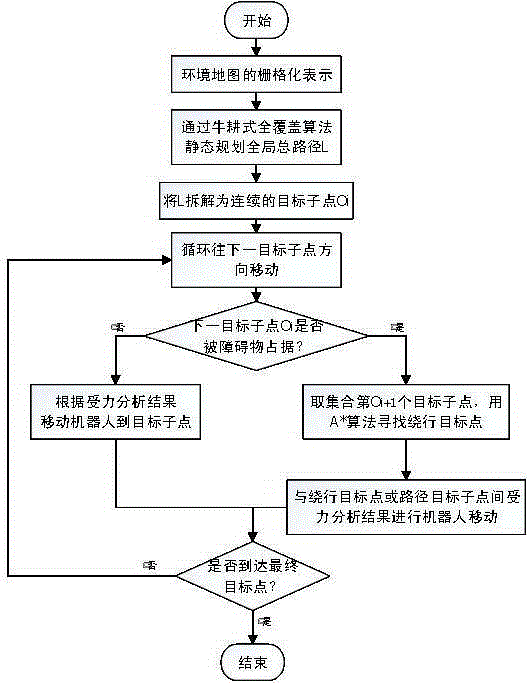
[0026] like figure 1 As shown, an improved potential field grid method applied to sweeping robots includes the following steps:
[0027] Step 1: Express the indoor environment map through the grid method. The size of the divided grid is determined according to the size of the sweeping robot on the market. Each cell is about 35cm2. If the obstacle exceeds 1 / 3 of the cell, it is determined that the grid robot is not reachable;
[0028] Step 2: Determine the starting position C of the robot in the grid map, and statically plan the global total path L for traversing the environment map through the cattle farming full coverage algorithm;
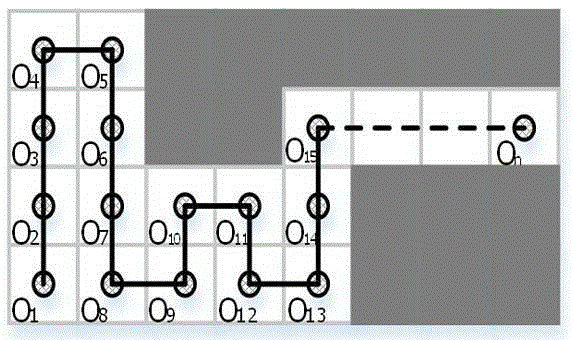
[0029] Step 3: On the grid map, split the global total path L into a continuous set of grid points: ,like figure 2 As shown, the value of n is related to the length of the path, but it is guaranteed that the last point On coincides with the end ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com