Flexible bionic manipulator
A manipulator and flexible technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of weight occupation, low degree of flexibility, and many wires, achieve a high ratio of grasping force to self-weight, improve the degree of intelligence, The effect of high degree of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] Below, in conjunction with accompanying drawing and specific embodiment, the present invention is described further:
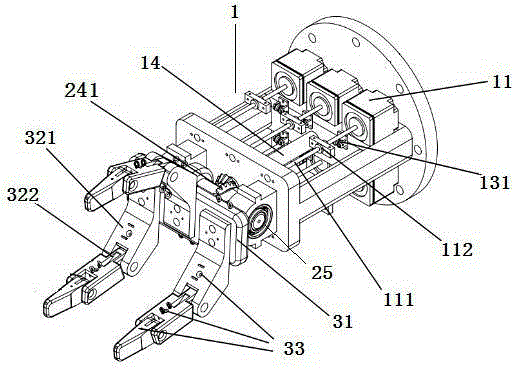
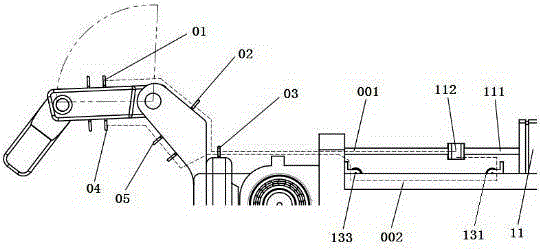
[0023] Such as figure 1 and figure 2 As shown, a flexible bionic manipulator includes a mechanical arm, a mechanical wrist, a mechanical finger and a traction mechanism:
[0024] The mechanical arm comprises an arm support 10, six motors 11 fixed on the rear end of the arm support 10, six trapezoidal screws 111 extending along the length direction of the arm support 10 and one-to-one corresponding to the motors 11, respectively matched and socketed in Six nuts 112 on the six trapezoidal screw rods 111, and the motor two 12 that the body part is fixed on the arm support 10; the front end of the trapezoidal screw rod 111 is pivotally connected to the front end of the arm support 10, and the rear end is connected to the corresponding motor one 11 on the reel;
[0025] The mechanical wrist includes a first swivel base 21 fixed to the front end of the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com