Device for guiding at least one line of a joint arm robot, and joint arm robot
The technology of a manipulator and an articulated arm is applied in the field of equipment for guiding at least one line of the articulated arm manipulator and the articulated arm manipulator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
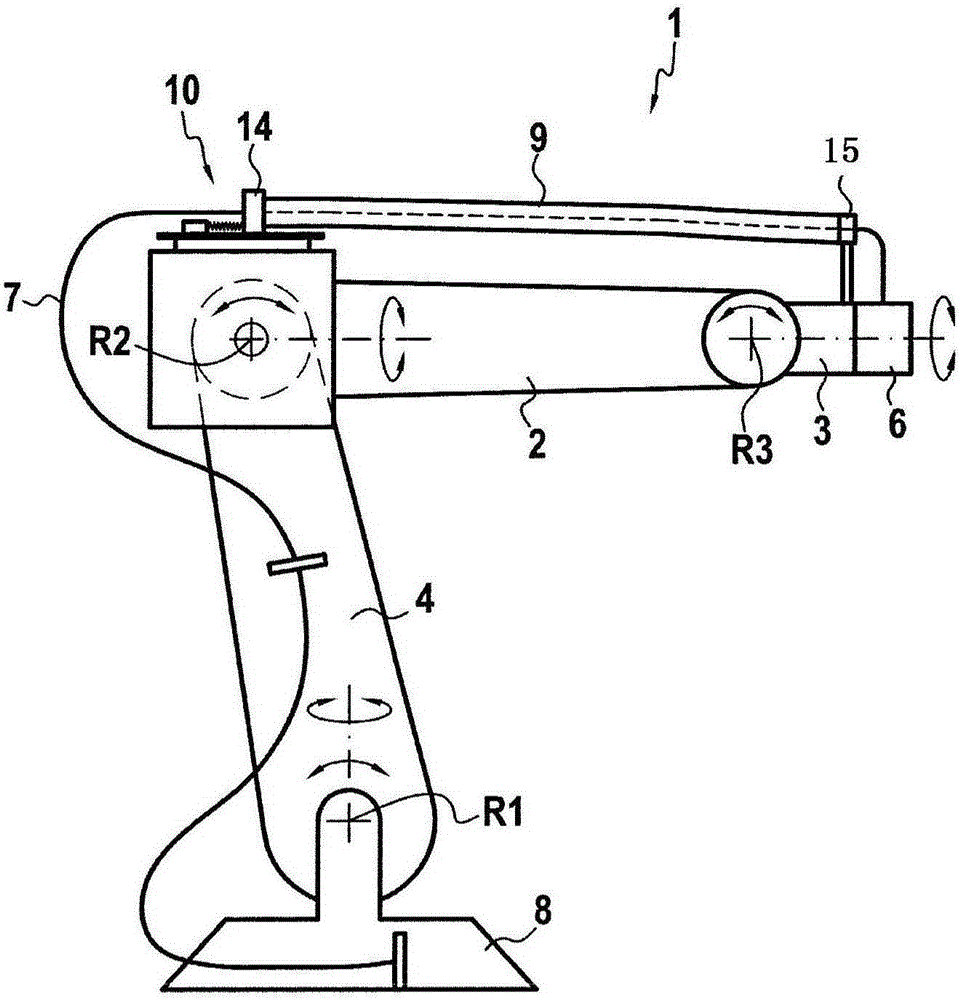
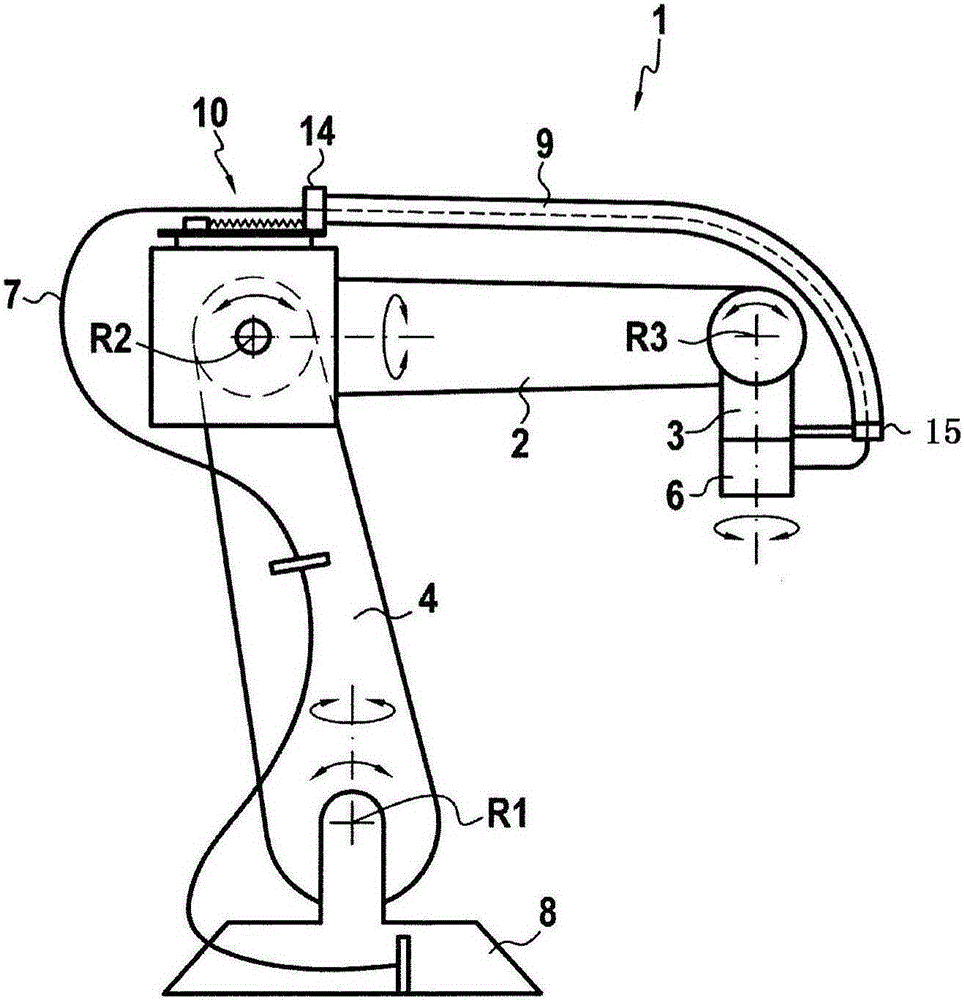
[0045] Figure 1A , 1B The articulated arm manipulator is shown in two different positions. The articulated arm manipulator 1 refers to, for example, a multi-axis industrial manipulator, especially a six-axis industrial manipulator or medical manipulator. The articulated arm manipulator has a base 8 , a first segment called rocker 4 , which is connected to the base 8 via a first articulated connection R1 . The rocker arm 4 is pivotable about the first articulated connection R1 about a horizontal axis. In addition, the rocker arm 4 is generally pivotable about a vertical axis relative to the base 8 . The rocker arm 4 generally extends upwards in a vertical direction. On a second articulated connection R2, a second segment, commonly referred to as robot arm part 2, is connected pivotally movable about a so-called "axis 3" to a rocker arm 4. Finally, the manipulator hand 3 as the third segment is connected to the second segment 2 via a third articulated connection R3. Finall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com