A polygonal wheel for ground robots
A robot and corner wheel technology, applied in the direction of wheels, transportation and packaging, vehicle parts, etc., can solve the problem of not effectively improving the ability of wheels to overcome obstacles, and achieve the effect of simple structure and convenient switching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] In order to make the objectives, technical solutions and advantages of the present invention clearer, the following will further describe the embodiments of the present invention in detail with reference to the accompanying drawings, but it is not intended to limit the present invention.
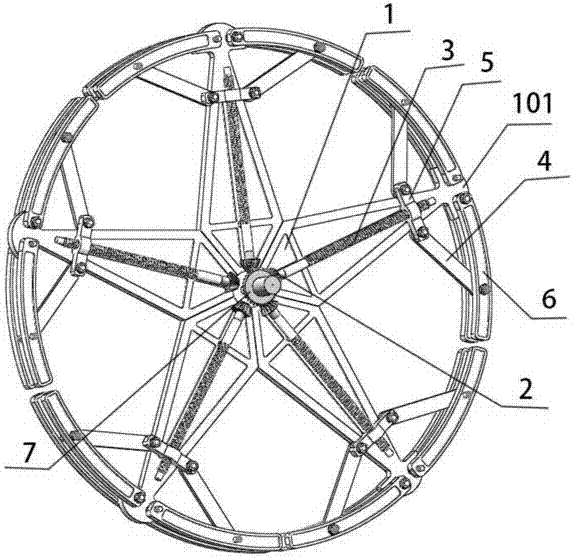
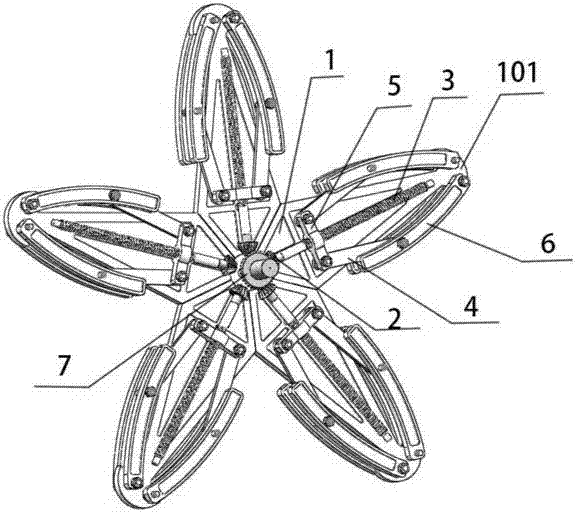
[0013] Such as figure 1 with figure 2 As shown, a polygonal wheel for ground robots includes a polygonal hub 1, a driven bevel gear 2, a screw 3, a connecting rod 4, a nut 5, a foot rod 6 and a driving bevel gear 7.
[0014] The polygonal hub 1 is an N-point star-shaped frame, which supports the entire wheel. The travel motor reducer can be connected to the center of the polygonal hub to drive the wheel to rotate (the driving method is not an invention, so it is not shown in the figure). Each corner tip 101 of the N-point star is semicircular.
[0015] The driven bevel gear 2 is fixed at one end of the screw 3, and each screw 3 is fixed on a corner of the polygonal hub 1 through a bearing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com