An Adaptive Navigation Method for Wheeled Robots Based on Online Learning Mechanism
A wheeled robot and navigation method technology, applied in the field of adaptive navigation of wheeled robots based on an online learning mechanism, can solve the problems of objective accompaniment of collision risk, inadaptation to dynamic environment, collision risk, and insufficient robustness of dynamic scenes, etc. Achieve the effect of optimizing the navigation path, preventing yaw, and reducing the risk of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0030] In order to further illustrate the technical scheme of the present invention, below in conjunction with Figure 1-3 The wheeled robot adaptive navigation method based on the online learning mechanism of the present invention is described in detail.
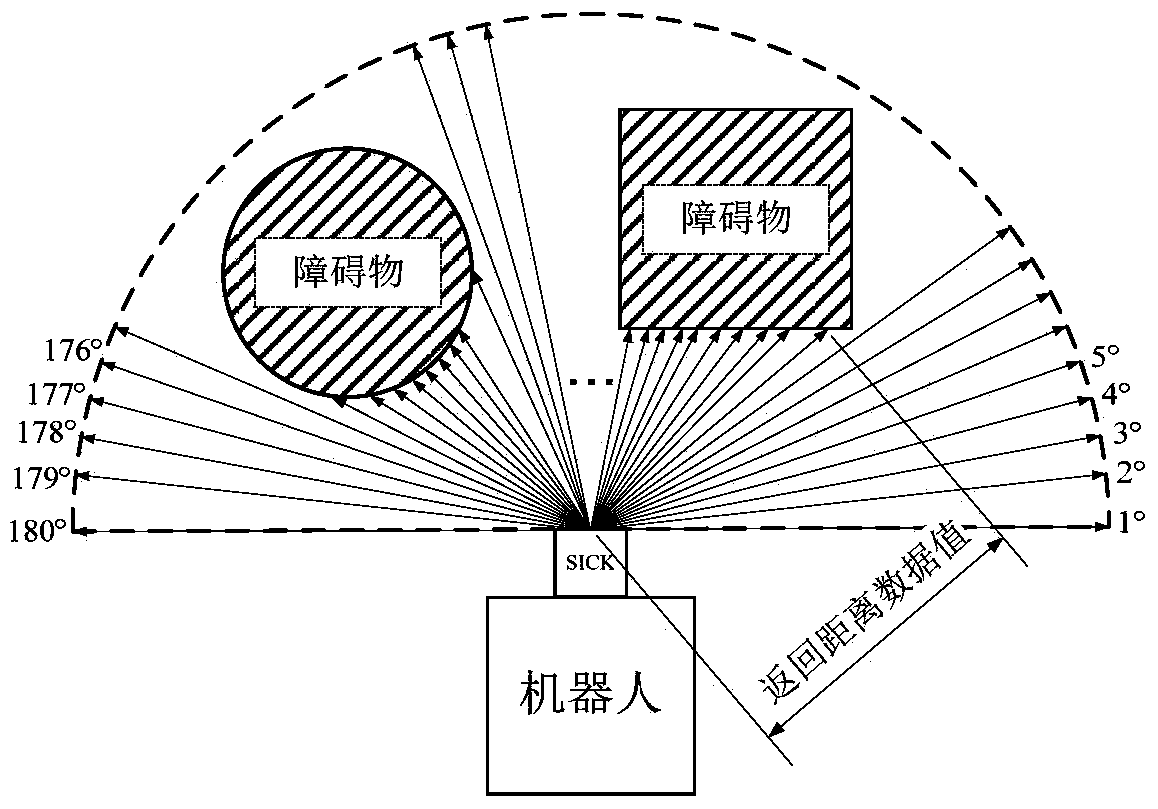
[0031] The present invention uses the SICK laser rangefinder to obtain the distance information of the current environment to perceive the surrounding environment, so that the wheeled robot can learn online according to the planned path, and the learning information is the current SICK laser data (that is, the laser distance data) corresponding to it. The speed data of , together with this mapping relationship, allows two sets of data to be stored in the IHDR tree. When the learning is completed, the IHDR is simultaneously established. When the wheeled robot performs adaptive navigation, it collects the current SICK laser data repeatedly, and first puts the data into the obstacle avoidance algorithm for inspection. The re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com