Cooperation stair climbing control method for caterpillar mobile robots
A mobile robot and control method technology, which is applied to tracked vehicles, motor vehicles, transportation and packaging, etc., can solve problems such as low climbing efficiency of stairs, and achieve the effects of clear layers, high efficiency, stable and reliable operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
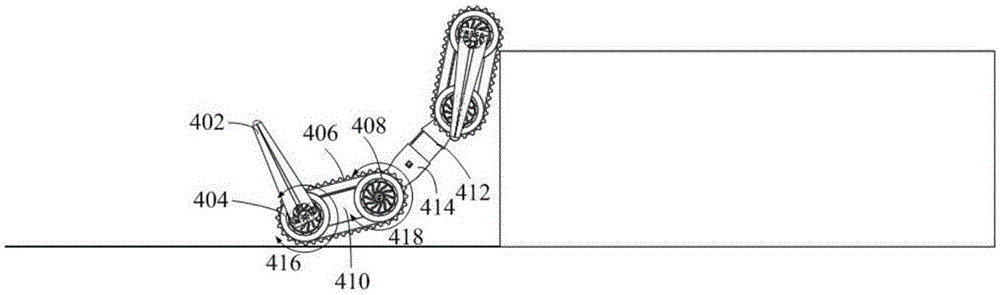
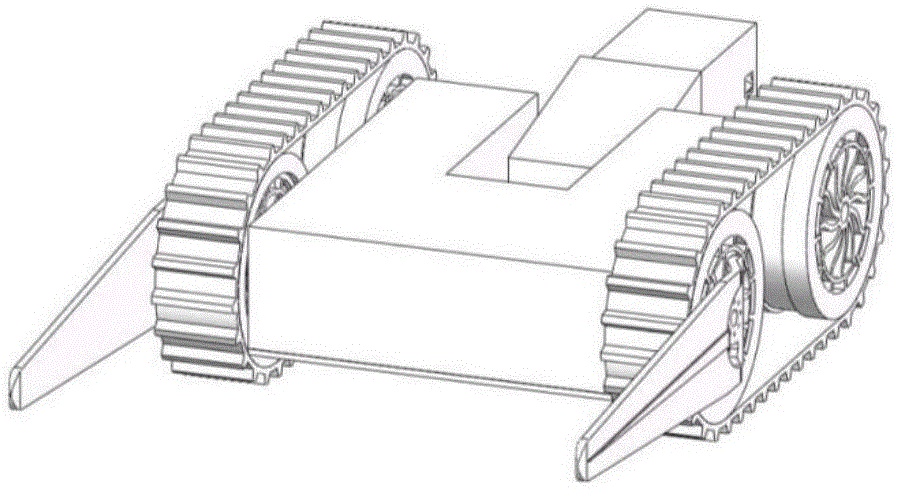
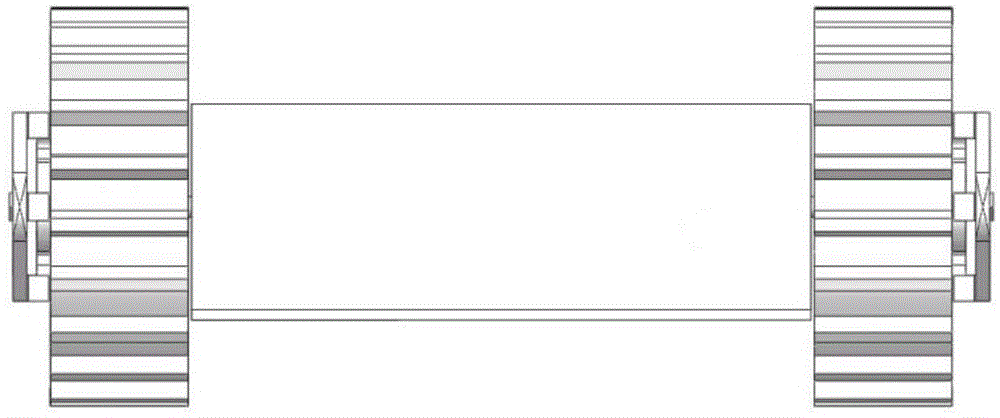
[0031] like figure 1 is a schematic diagram of a specific embodiment of the invention. The present invention includes two crawler-type mobile robots with double-rod arms, consisting of a crawler-type mobile robot with a male docking device 412 and a crawler-type mobile robot with a female docking device 414 through docking. The crawler type mobile robot with male port docking device and female port docking device all comprises frame 410, follower guide wheel 408, drive wheel 404, is coated on described follower guide wheel 408 and described drive wheel 404 The crawler belt 406 on the top; the double-bar arm 402 that can rotate around the axis of the driving wheel 404 is arranged on the driving wheel 404 . The lever arm can rotate around the axis of the driving wheel, and the direction of rotation is as follows: figure 1 Shown; Both the male port docking device 412 and the female port docking device 414 can rotate around the axes of the follower guide wheels of the two crawle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com