Solving method of kinematics of underwater mechanical arm based on configuration plane
A technology of underwater machinery and kinematics, used in instruments, adaptive control, control/regulation systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
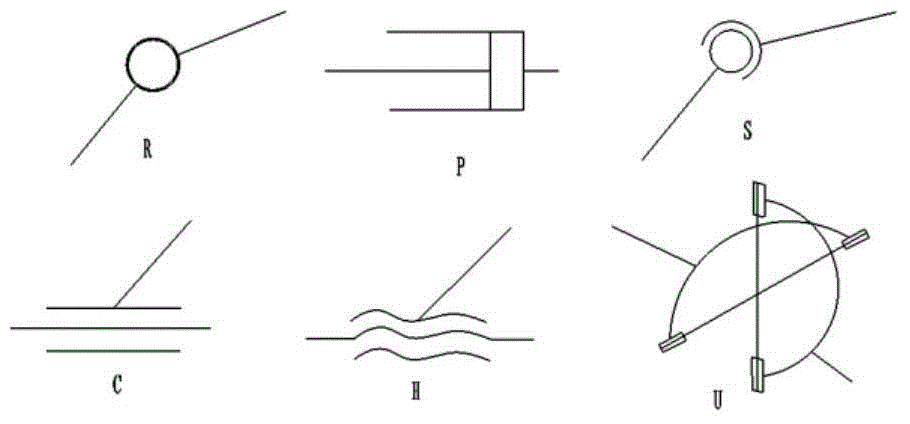
[0151] Implementation 1, combined figure 1 , The space mechanism of the robot is mainly composed of low auxiliary mechanism. The low pair mechanism mainly includes rotating pair (R), moving pair (P), screw pair (H), cylindrical pair (C), plane pair (E), spherical pair (S) and Hooke hinge (HO) or general joint (U). Among them, the degree of freedom of the rotating pair, the moving pair and the screw pair is 1, the degree of freedom of the cylindrical pair (PR) and the universal joint (RR) are 2, and the degree of freedom of the plane pair (PPR) and the spherical pair (RRR) are 3.
Embodiment 2
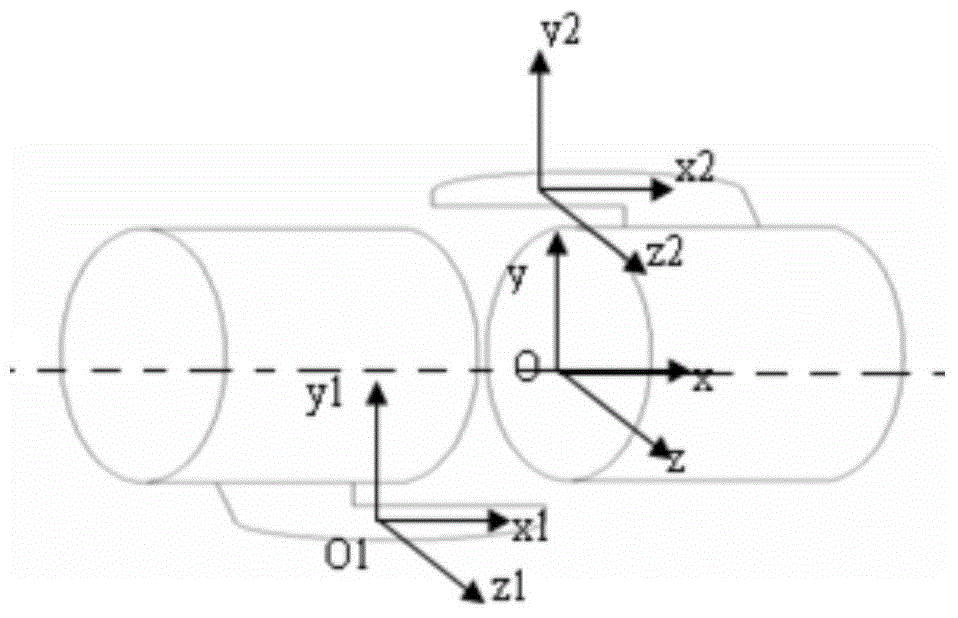
[0152] Implementation 2, combined figure 2 , Modeling of swing module: Establish the coordinate system of the module at the swing center of the module. When the module rotates, the coordinate system of the module is unchanged relative to the connection coordinate system of the previous module, but relative to the connection coordinate system of the next module. The coordinate system changes. Mathematical model matrix of swing module movement:
[0153] T yb = 1 0 0 0 0 cos β yb - sin β yb h yb cos β yb 0 sin β yb cos β yb h yb sin β yb 0 0 0 1 - - - ( 1 )
[0154] Where β yb —The relative angle of rotation of the two parts of the swing module;
[0155] h yb —The length from the center of the swing to the connecting surface of the next module.
Embodiment 3
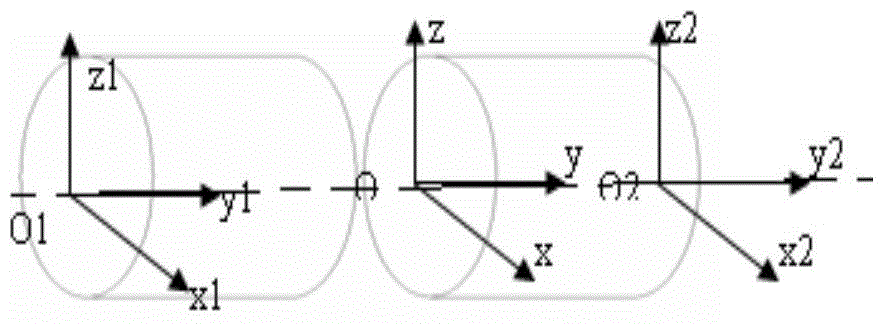
[0156] Implementation 3, combined image 3 , Mobile module modeling: The coordinate system of the module is established on the connecting surface of the fixed part and the moving part of the mobile module. When the module is moved, the coordinate system of the module is unchanged relative to the connection coordinate system of the previous module, and the coordinate system of the next module is unchanged. The coordinate system of the connected module changes relative to the coordinate system of the module. In order to reconstruct the kinematics between the modules, the coordinate matrix on the two connecting surfaces adopts a standard form. The kinematics model of the module is equation (2).
[0157] Movement math model matrix of mobile module:
[0158] T yd = 1 0 0 0 0 1 0 H yd + h yd 0 0 1 0 0 0 0 1 - - - ( 2 )
[0159] Where H yd —The length from the center of the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com