Tracked Mobile Robot Suspension System
A mobile robot and suspension system technology, applied in tracked vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of limited traction force and small contact area of robots, and achieve the effects of stable power output, buffering and absorbing vibration energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
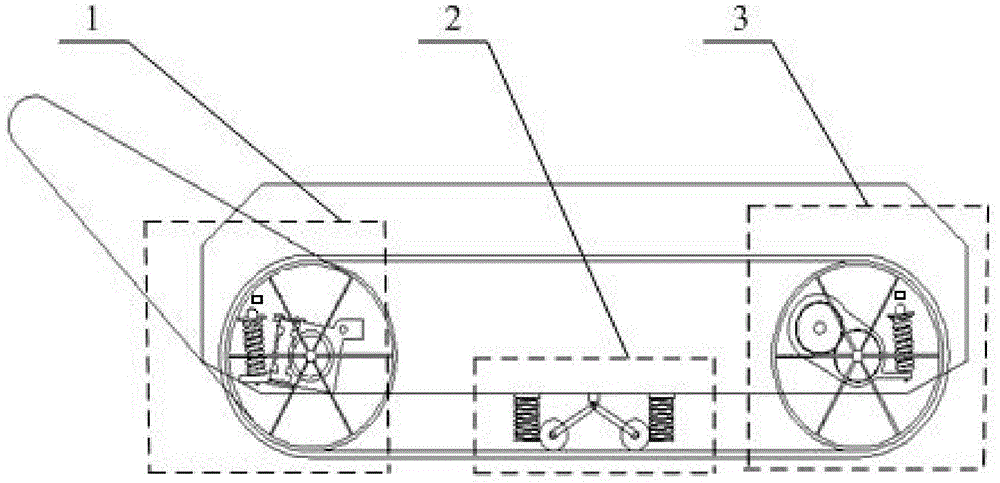
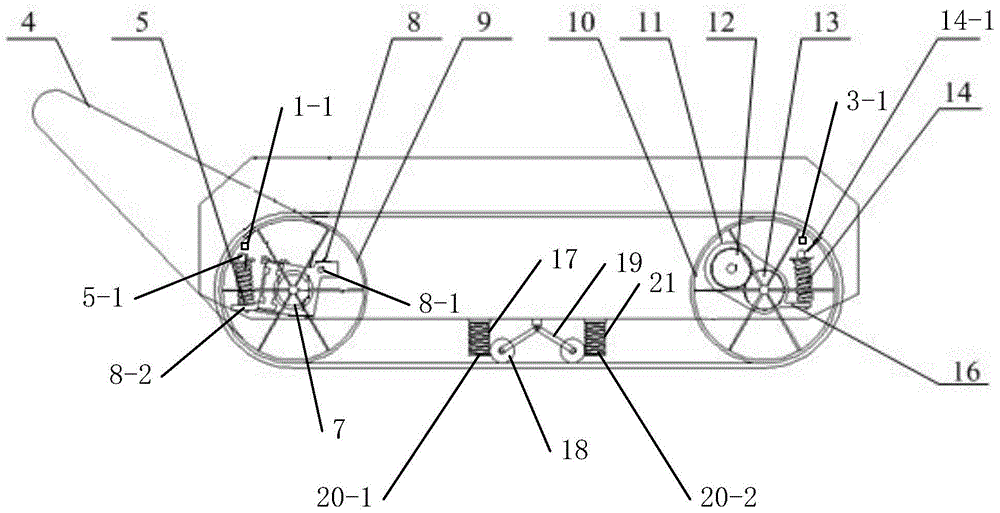
[0037] Specific implementation mode one: see Figure 1 to Figure 3 Describe this embodiment, the crawler type mobile robot suspension system described in this embodiment, it comprises front swing arm power output suspension 1, rear driving wheel suspension 3 and middle road wheel suspension 2; Middle road wheel suspension 2 Located between the track of the crawler mobile robot and the bottom of the car body,
[0038] Front swing arm power output suspension 1 includes No. 1 spring 5, first bearing 7, No. 1 hinge 8, No. 1 fixed rod 1-1,
[0039] The No. 1 hinge 8 is located close to the car body side of the crawler-type mobile robot, and the front driven wheel 9 and the front swing arm 4 of the crawler-type mobile robot are successively away from the No. 1 hinge 8,
[0040] The No. 1 hinge 8 is rotationally connected with the main shaft of the front driven wheel 9 of the crawler-type mobile robot through the first bearing 7, and one end of the No. 1 hinge 8 is provided with a t...
specific Embodiment approach 2
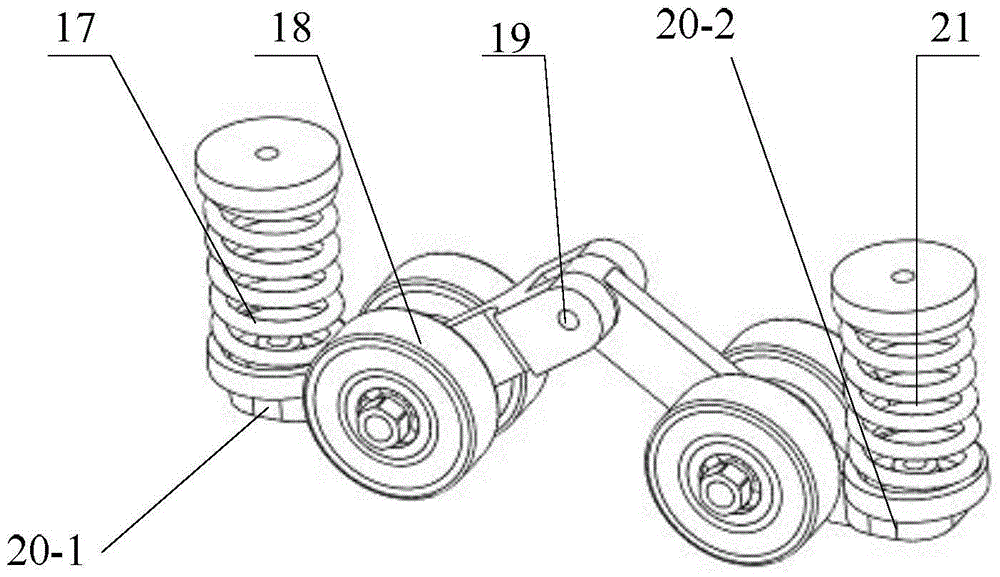
[0065] Embodiment 2: The difference between this embodiment and the crawler-type mobile robot suspension system described in Embodiment 1 is that the four road wheels 18 are hinged to a herringbone structure through the No. 2 hinge 19 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com