ASM-based lane line detection method
A technology for lane line detection and images to be detected, which is applied to instruments, character and pattern recognition, computer components, etc., can solve the problem of not meeting the real-time performance of automobile auxiliary safety driving system, and unable to quickly and accurately realize lane line recognition and tracking and other issues to achieve the effects of improving speed and effectiveness, accurate detection and tracking, and improving speed and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
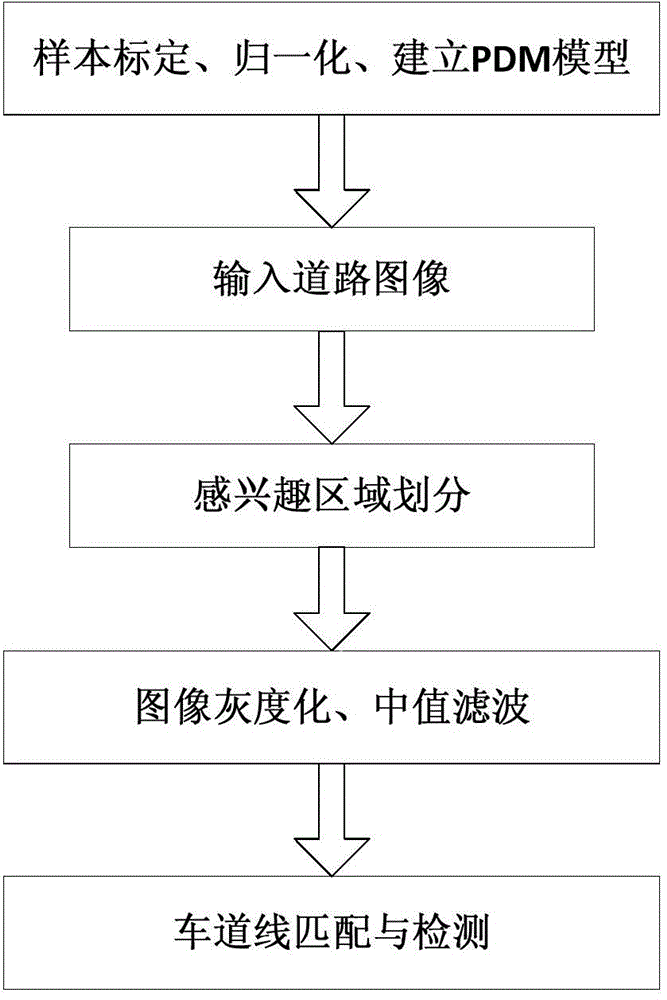
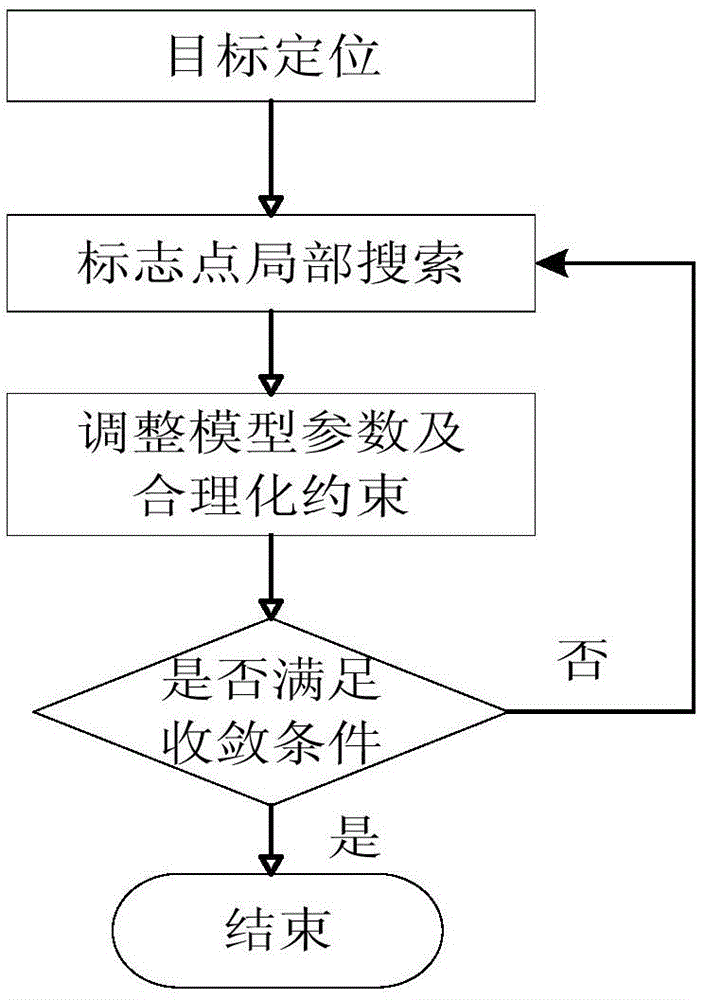
[0029] Such as figure 1 and 2 As shown, a kind of lane line detection method based on ASM of the present invention, specifically carries out according to the following steps:
[0030] 1. Sample calibration
[0031] Sample calibration is to calibrate the feature points of each sample in the sample set. The feature point set is required to describe the shape of the object as accurately as possible. The basis for selecting feature points is: points with special application significance on the target contour or points with certain geometric characteristics, such as connection points of line segments, extreme points of angle and curvature.
[0032] The calibration work is done manually and the number, order and corresponding position of the selected feature points on each shape must be the same. Let for each sample X i Taking n feature points, the sample can be expressed as a 2n-dimensional coordinate vector:
[0033] x i =(x i1 ,x i2 ,...x in ,y i1 ,y i2 ,...y in ) T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com