An Optimal Integral Sliding Mode Control Method
A control method and integral sliding mode technology, applied in the field of control, can solve problems such as the inability to effectively compromise the system response time and overshoot, and the inability to achieve finite time convergence of the system state.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
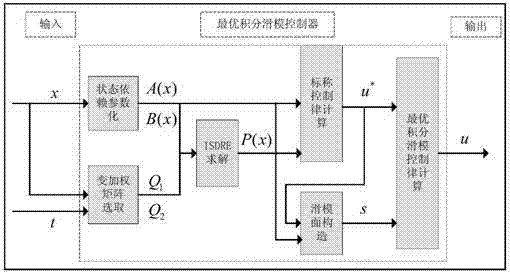
[0083] This embodiment is aimed at the description of the nominal system without disturbance, and mainly explains the advantages of the improved control method based on the state-dependent Riccati equation (ISDRE). An optimal integral sliding mode control method disclosed in this embodiment includes the following steps :
[0084] Step 1, establish a dynamic model of the second-order nonlinear system. The dynamic model of the second-order nonlinear system is shown in formula (1).
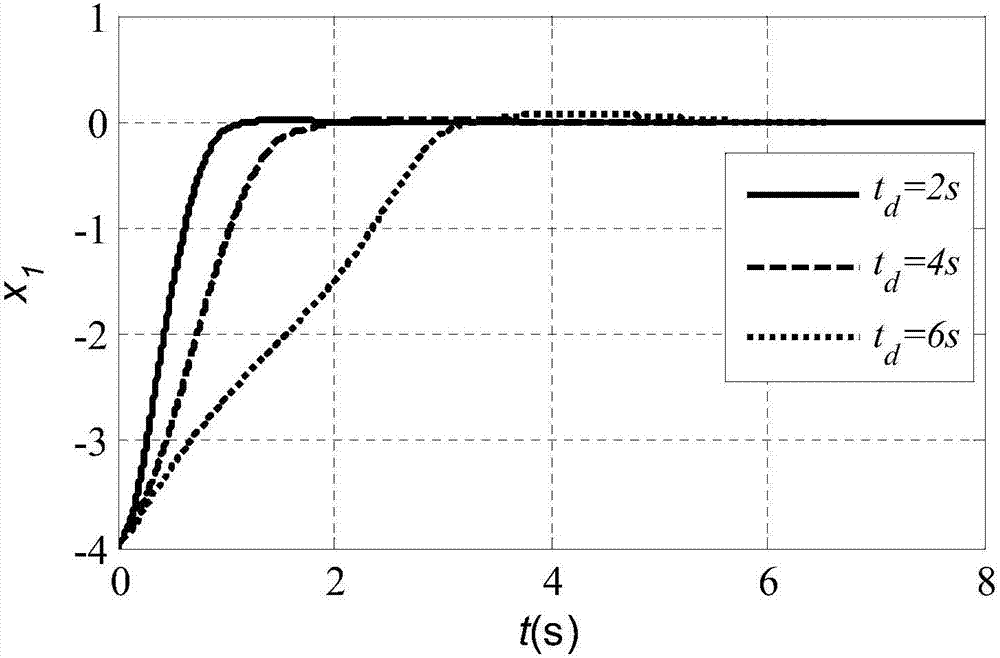
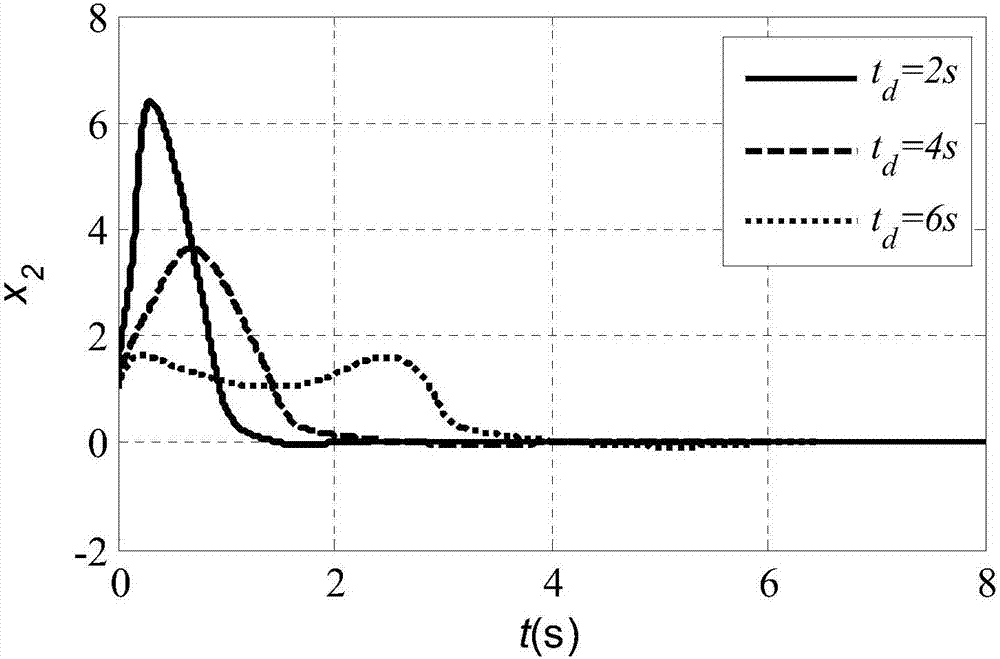
[0085] System initial value x 0 =[-4,2] T . f(x)=0.3sin(x 1 +2x 2 )-2x 1 +x 2 , g(x)=0.5sin(x 1 +x 2 )+1.
[0086] Extending the linearization of this nonlinear system, the form of the state correlation coefficient SDC (state-dependent coefficient) is obtained as shown in formula (2), where the parameter matrix is constructed in the following form:
[0087]
[0088]
[0089] Step 2, by improving the state-dependent Riccati equation (ISDRE), the finite time convergence of the system...
Embodiment 2
[0102] This embodiment is due to the advantages of the improved optimal sliding mode control method based on the state-dependent Riccati equation (ISDRE) proposed by the present invention, such as Figure 7 As shown, an optimal integral sliding mode control method disclosed in this embodiment includes the following steps:
[0103] Step 1, establish the dynamic model of the second-order nonlinear system with disturbance. The dynamic model of the second-order nonlinear system is shown in formula (9). Wherein the system parameters are the same as in Embodiment 1, and the disturbance term d(x, t)=0.6sin(10t)+0.2cos(0.5x 1 +7x 2 ). The disturbance term d(x,t) satisfies the matching condition and is bounded, and the upper bound of |d(x,t)| has a maximum value △d max = 0.8.
[0104] Step 2. For the nominal system without the disturbance term d(x,t), a control law based on the improved state-dependent Riccati equation (ISDRE) is given. The steps and forms for solving the control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com