Unmanned ground vehicle real-time track planning method based on speed impediment
A trajectory planning and speed obstacle technology, applied in the field of intelligent transportation system, can solve the problems of computational geometry method, such as large amount of calculation, difficult planning result and computational efficiency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In the process of driving in a real environment, unmanned vehicles often need to perform complex maneuvers such as changing lanes, avoiding obstacles, or turning in a dynamic environment where multiple vehicles traveling in the same direction and pedestrians interfere with each other. A reasonable and effective real-time trajectory planning method is the premise and basis for unmanned vehicles to drive safely in a dynamic environment.
[0063] The present invention will be described in further detail below.
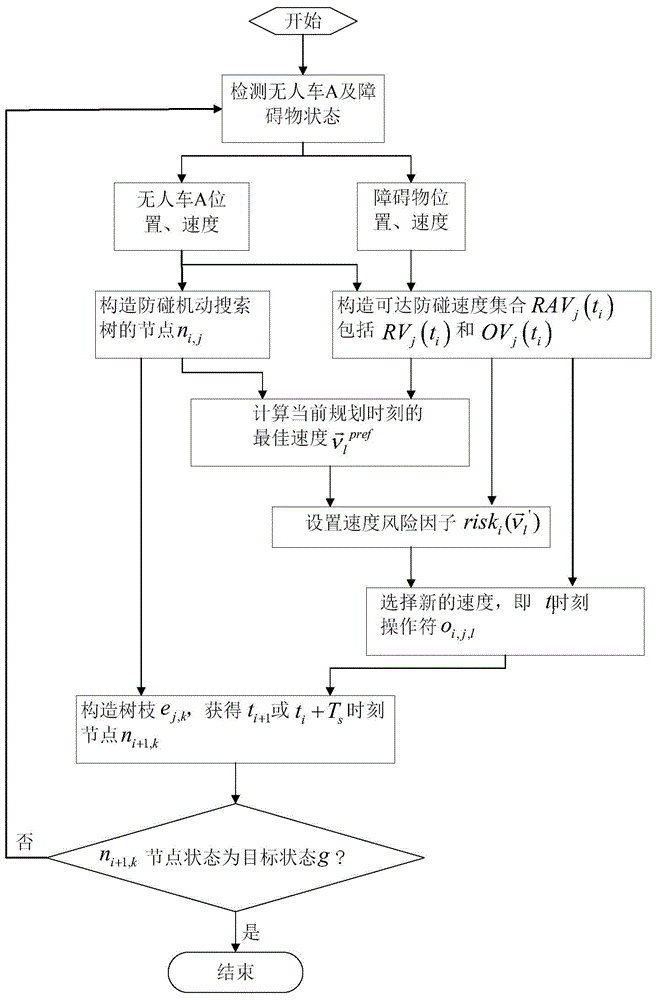
[0064] See figure 1 , A real-time trajectory planning method for unmanned vehicles based on speed obstacles of the present invention is divided into the following seven steps, and each step is specifically as follows:
[0065] 1) Construct node n of the anti-collision maneuver search tree based on the current position of unmanned vehicle A i,j :
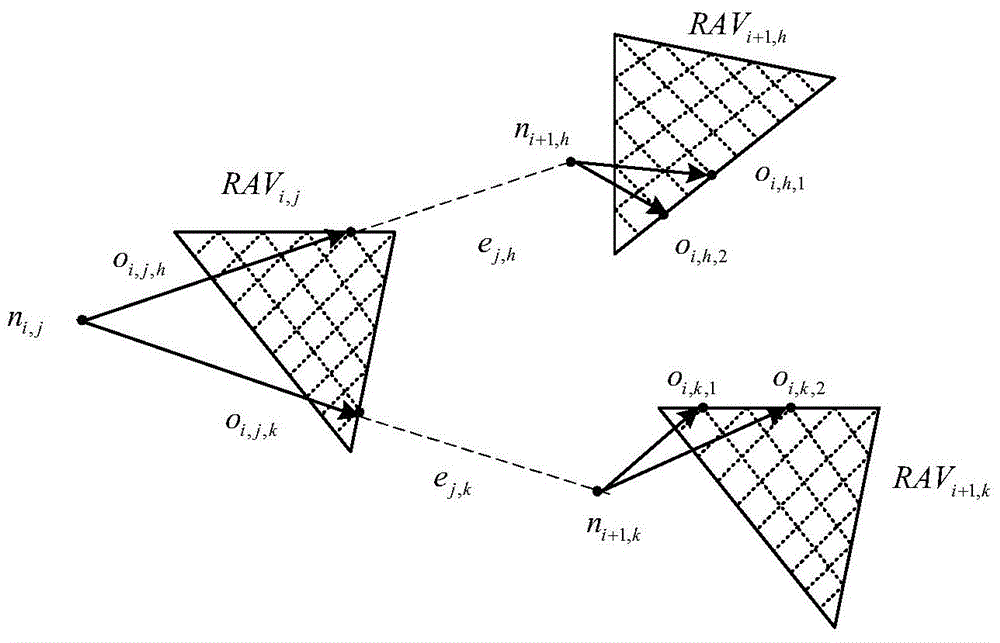
[0066] See figure 2 , Here we use the anti-collision maneuver search tree at discrete moments to represent the state space of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com