Ridge-regression-extreme-learning-machine-based local path planning method for outdoor robot
A technology of local path planning and ELM, applied in the field of robot navigation, which can solve the problems of increased computational complexity and difficult application of intersection planning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0142] In this embodiment, the experiment is completed by selecting the scene in the railway campus of Central South University. The campus environment is an unstructured road with a width of about 10m. Buildings with steps, buildings with squares, etc., and various vegetation, such as taller trees, shorter ornamental plant lights; there are other driving or stopped vehicles, single pedestrians or multiple passing vehicles on the road ahead of the outdoor robot. Pedestrians and so on.
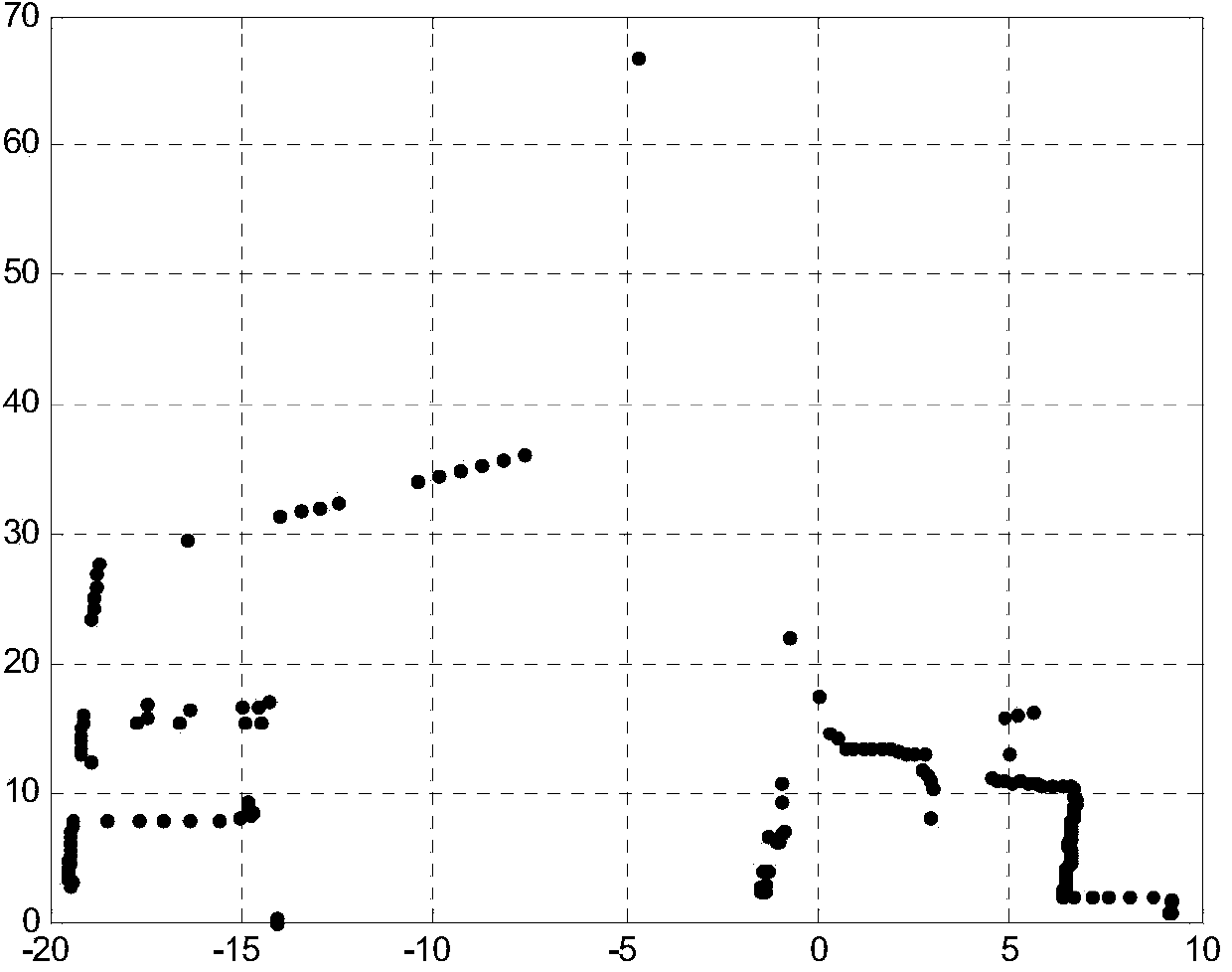
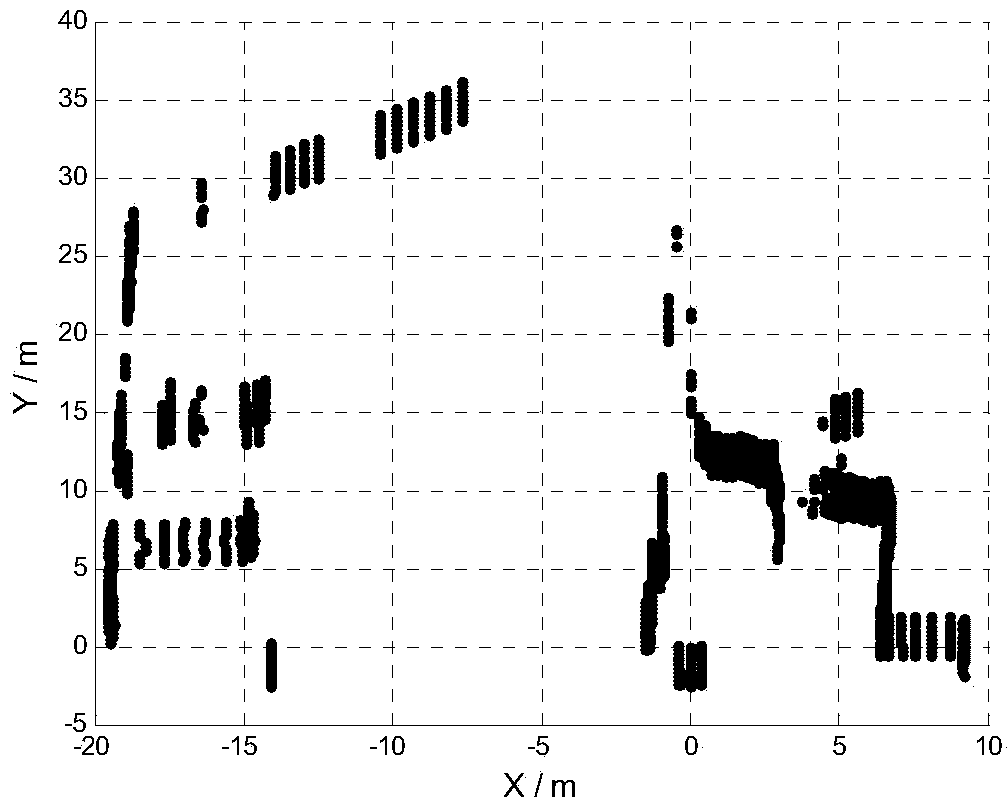
[0143] The outdoor robot described in this embodiment is equipped with sensors such as laser radar, millimeter-wave radar, GPS, inertial autopilot, camera, etc., and uses a computer with Intel E7500 dual-core processor, 2.93GHz main frequency, and 2GB internal memory; the software platform of the experiment is : Use the Windows 7 Ultimate operating system, the compilation environment is Matlab R2010b, and the C / C++ programming language is used. In the actual environmental information collectio...
specific Embodiment approach
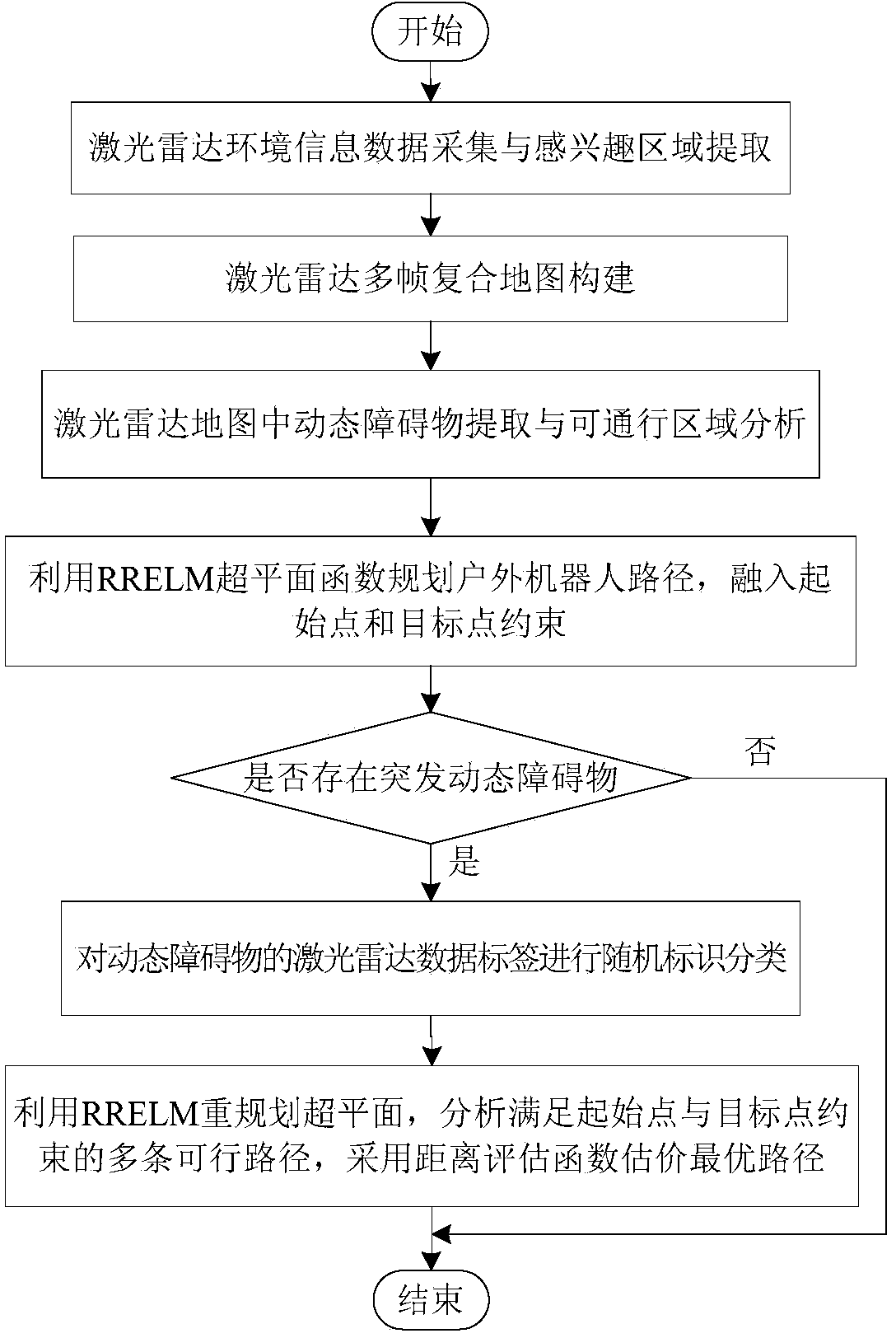
[0169] 4. Use the RRELM hyperplane function to segment the lidar environment information feature points, and consider the starting point and target point constraints of path planning, so as to obtain the local path planned by the robot. The specific implementation method is:
[0170] (a) Incorporate the starting point and target point constraints and add it to the hyperplane function. It is necessary to form several auxiliary data points around the starting point and the target point, and list the auxiliary points on the left as class 1, and the auxiliary points on the right as class 1 class 2, and then all are added to the original data, and the learning model is obtained by training with RRELM.
[0171] In this embodiment, according to the starting point (-5, 0) and target point (0, 40) in the passable area, 6 auxiliary points are generated on the left and right sides of the two points: starting point s=(- 5, 0) around s1 = (-4.5, 0), s2 = (-4.5, 0.5), s3 = (-4.5, -0.5), s4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com