Distributed multi-robot containment collision prevention control method
A multi-robot, control method technology, applied in the field of intelligent robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0058] The steps of the specific embodiment of the present invention are as Figure 7 shown.
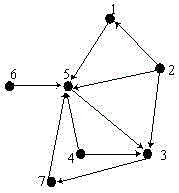
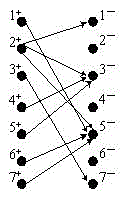
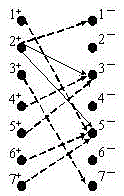
[0059] Using bipartite graph maximum matching algorithm to determine the schematic diagram of driving nodes: Generally speaking, the goal of complex network control is to make the entire network controllable and reach the expected state by inputting signals to several selected control nodes.
[0060] In modern control theory, system controllability is a more general concept that reflects the ability of the input to control the system state. Given a linear steady-state control system:
[0061] x · = Ax ( t ) + Bu ( t ) , x ∈ R N , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com