Integrated navigation method for unmanned vehicles based on visual screening
An unmanned vehicle and integrated navigation technology, applied in the field of integrated navigation and unmanned vehicle integrated navigation, can solve the problems of pseudo-range estimation deviation, inaccurate positioning, etc., to improve reliability, novel methods, and avoid dimensional disasters. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
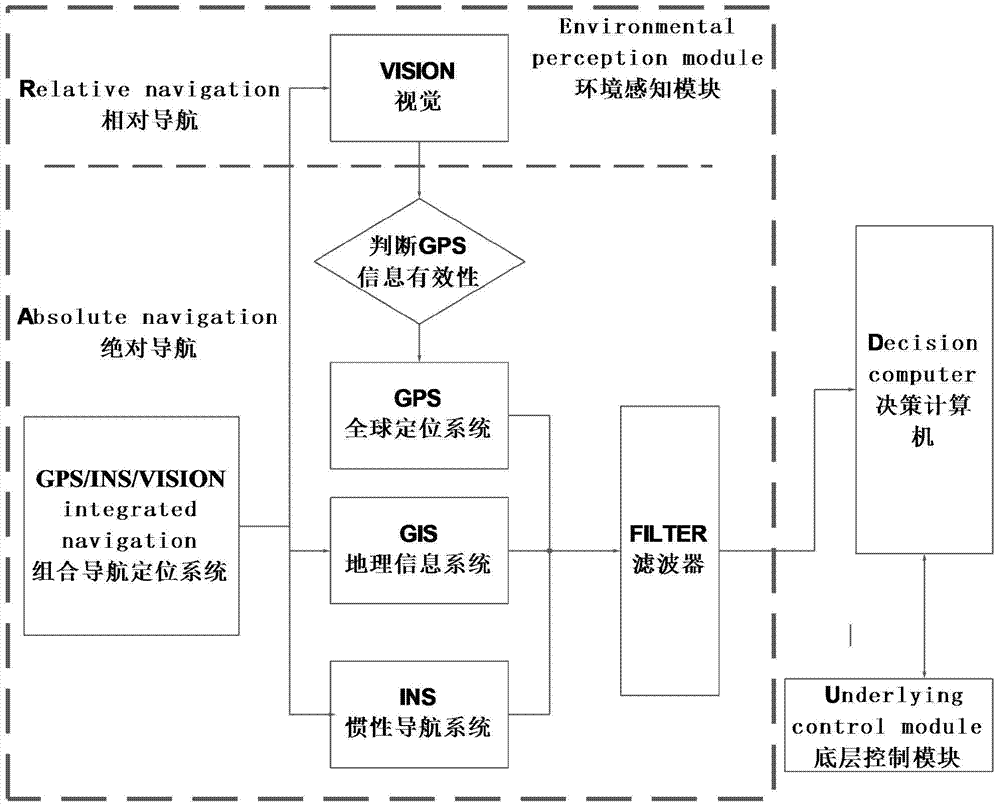
[0041] Schematic diagram of the architecture of integrated navigation system for unmanned vehicles based on visual screening. figure 1 shown. The flowchart of the method of the present invention is as figure 2 shown, including the following steps:
[0042] Step 1, coordinate system conversion.
[0043] Step 1.1: Convert the earth coordinate system to the visual coordinate system.
[0044] Camera imaging transformation involves conversion between different coordinate systems, including earth coordinate system, camera coordinate system, imaging plane coordinate system and image plane coordinate system.
[0045] In the smart car vision system, it is necessary to convert the earth coordinate system into the camera coordinate system and the origin of the earth coordinate system O w On the ground directly below the center of gravity of the vehicle, z v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com