A 3D Coordinate Measurement Method Based on Ray Angle Calibration
A technology of light angle and measurement method, which is applied in the direction of measuring device, optical device, image data processing, etc., can solve the problems of not being able to realize fast measurement, fast and real-time, etc., and achieve low hardware requirements, high accuracy of measurement results, The effect of simple system structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in more detail below in conjunction with the accompanying drawings and specific embodiments.
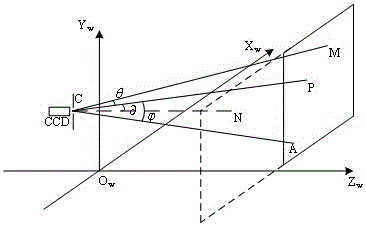
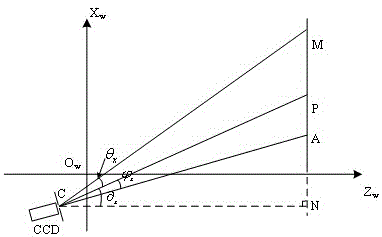
[0018] A three-dimensional coordinate measurement method based on light angle calibration, the system model is as follows figure 1 As shown, the display is used as its calibration surface, and the black and white checkerboard plane with grayscale values of 255 and 0 is used as a template, and a checkerboard with an appropriate size is designed according to the screen size and resolution of the display. The display is parallel to X in the world coordinate system w o w Y w Surface, the Z of all pixels on it w Coordinates are fixed values. In order to eliminate the influence of pupil aberration on the system, a diaphragm is set near the lens.
[0019] Step 1: Measure the coordinates of feature points on the external aperture and the plane calibration target
[0020] Add an external light hole in front of the camera lens, measure the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com