Car body stable control method of four-wheel independent drive electric car
A technology for four-wheel independent drive and electric vehicles, which is applied to electric vehicles, control drives, control devices, etc., and can solve problems such as complex structures, weak real-time performance, and weak self-adaptive capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
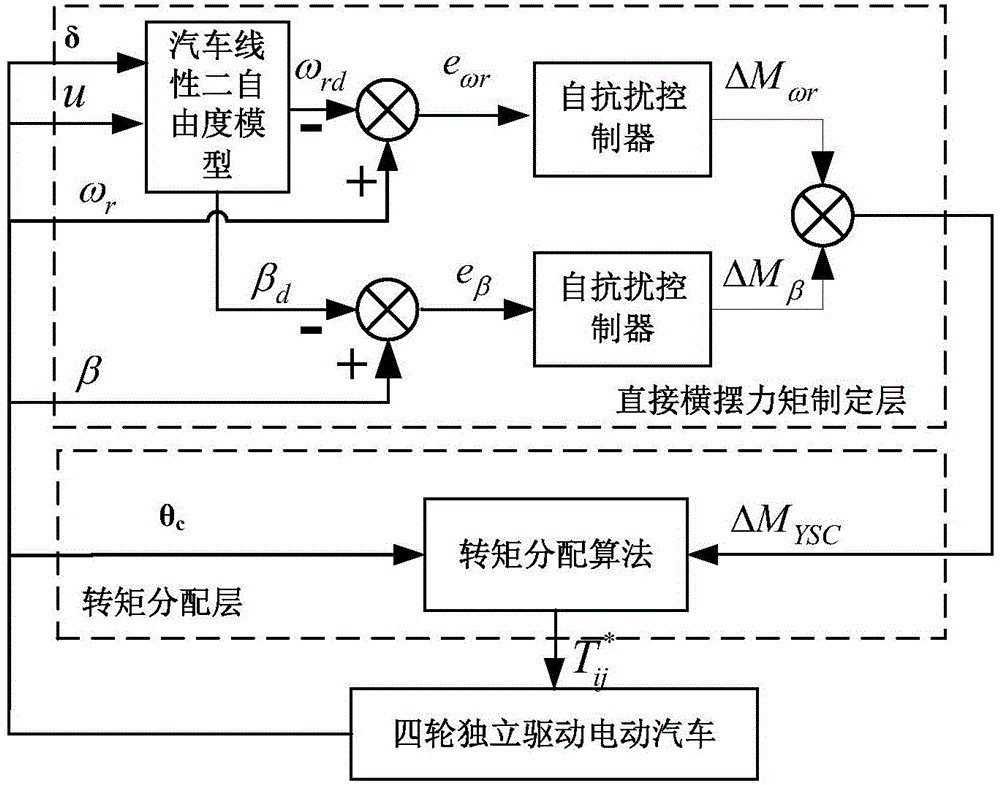
[0045]figure 1 It is a block diagram of the body stability control system.
[0046] In this example, if figure 1 As shown, the control algorithm adopts a double-layer control structure, the upper layer is the direct yaw moment setting layer, and the lower layer is the torque distribution layer. In the direct yaw moment formulation layer, the vehicle parameters longitudinal speed u and front wheel rotation angle δ are obtained from the vehicle model of the four-wheel independent drive electric vehicle, and the expected value of the yaw rate ω is obtained through the linear two-degree-of-freedom steering model of the vehicle rd , the expected value of the center of mass sideslip angle β d is 0, the actual yaw rate value ω r and the expected yaw rate value ω rd Subtracting each other to get the yaw rate deviation eωr ;Center of mass sideslip angle value β and center of mass sideslip angle expected value β d Subtraction to get the center of mass slip angle deviation e β , be...
example
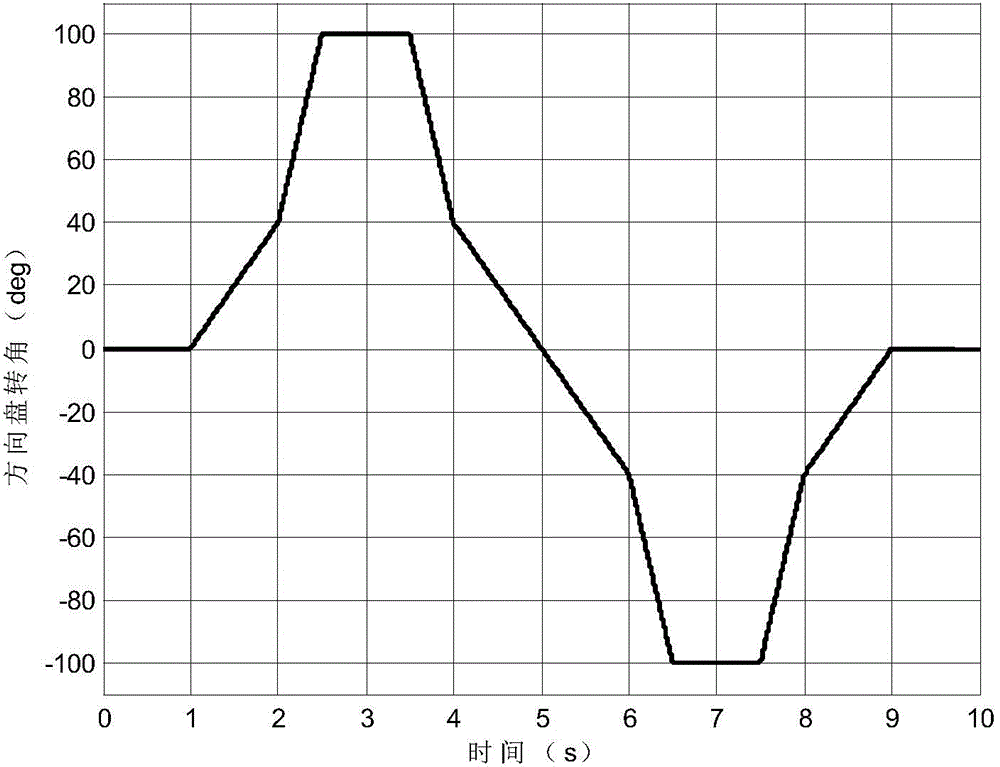
[0086]The total mass m=1650kg, the wheelbase L=3.05m, the distance from the center of mass to the front axle a=1.40m, the distance from the center of mass to the rear axle b=1.65m, the cornering stiffness of the front wheel C af =-40500, rear wheel cornering stiffness C ar =-40500 four-wheel drive electric vehicle, when verifying that the vehicle speed is 70km / h, verify the tracking characteristics and anti-disturbance characteristics of the controller designed by the present invention.
[0087] figure 2 It is the curve diagram of the steering wheel angle setting during the tracking ability test.
[0088] In this example, if figure 2 As shown, the set curve is similar to a triangle wave or a sine wave, which means that for any steering wheel angle setting, according to figure 2 The steering wheel angle is used to verify the tracking ability of the controller.
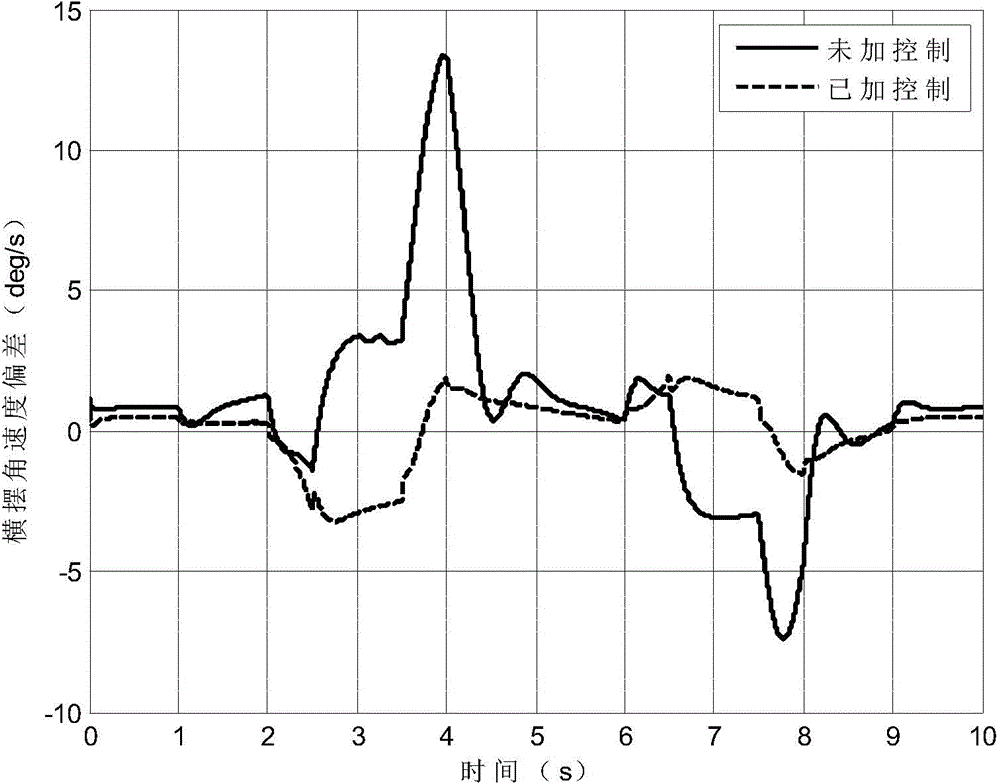
[0089] image 3 It is the simulation curve of the yaw rate deviation during the tracking ability test.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com