Multi-section peristaltic snakelike robot working in nuclear fusion bin
A snake-like robot, motion module technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of unstable operation, lowering, limited space detection range and positioning accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
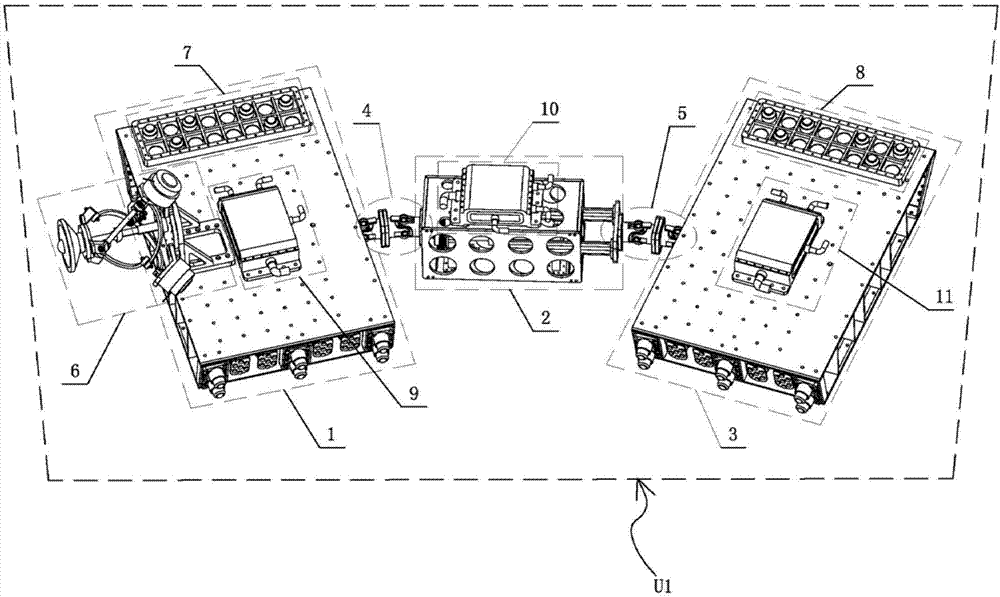
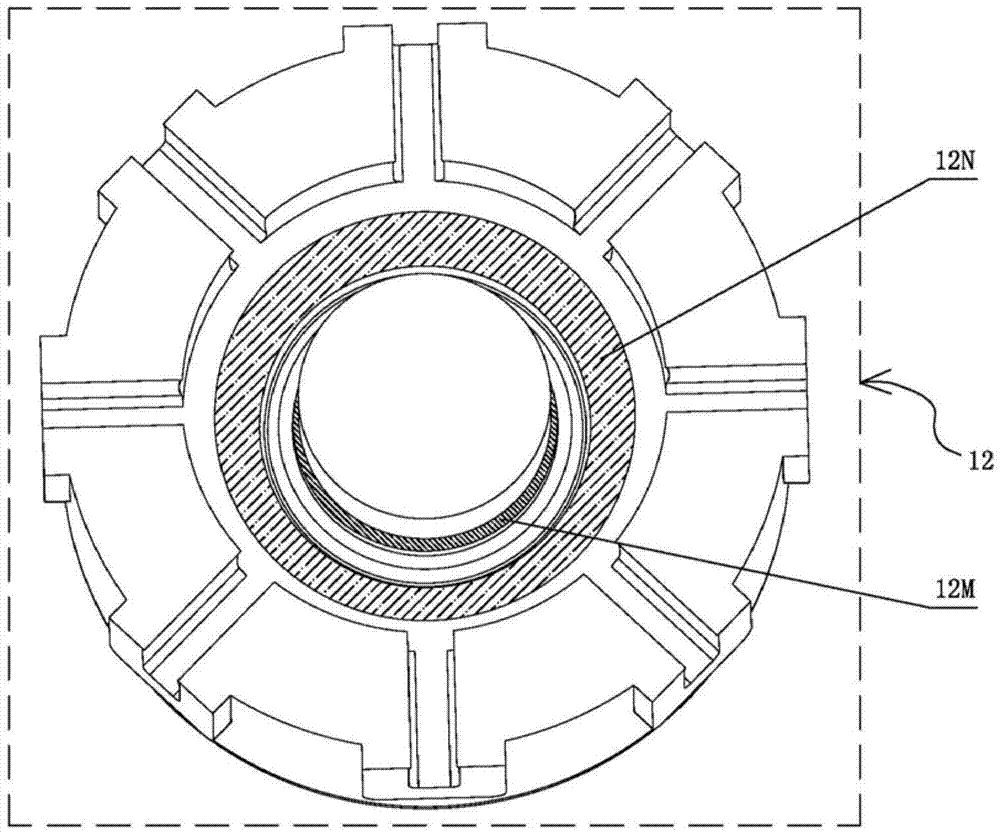
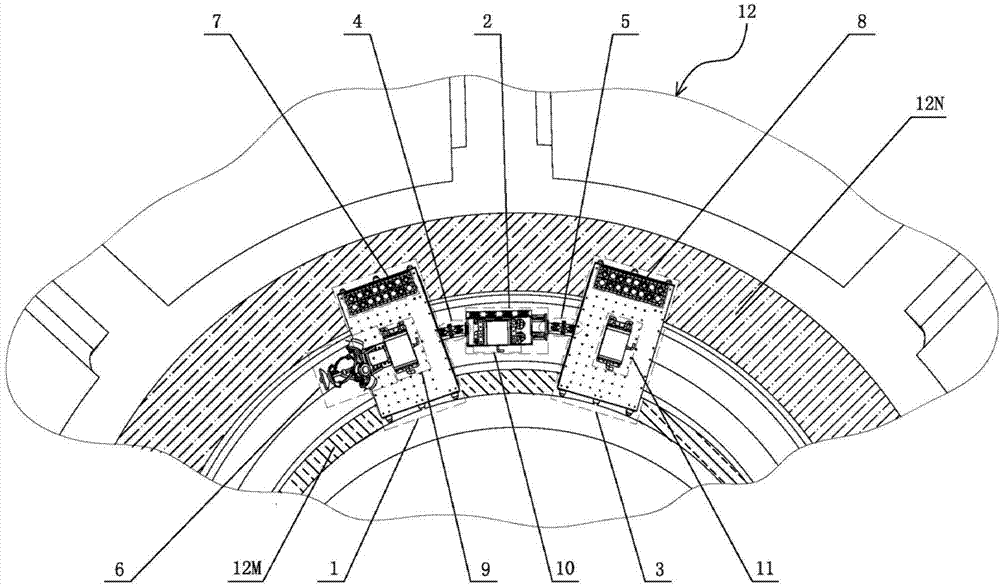
[0076] The structural form of the multi-segment peristaltic snake-like robot running in the nuclear fusion cabin in this embodiment is: Figure 21 , Figure 22 , figure 1 , figure 2 with image 3 As shown, the front body segment lateral positioning module 1 and the rear body segment lateral positioning module 3 are arranged symmetrically at both ends of the middle body segment axial movement module 2 to form a walking mechanism, and the walking mechanism is used as a peristaltic unit U1, consisting of at least two Two peristaltic units U1 are connected in series to form a multi-stage peristaltic snake robot, and adjacent peristaltic units U1 are connected by telescopic elastic double universal joints 13 .
[0077] Figure 4 As shown, the structure of the front body segment lateral positioning module 1 is as follows: the electric drive sub-module 1B is fixed inside the bearing sub-module 1A, and has the same structural form of the inner side split support sub-module 1C and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com