Point cloud registering method based on iterative closest point algorithm
A point cloud registration and iterative technology, applied in the computer field, can solve the problems of being easily affected by noise data, low registration accuracy, and underutilization, etc., and achieves high accuracy, high robustness, robustness and high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with the drawings.
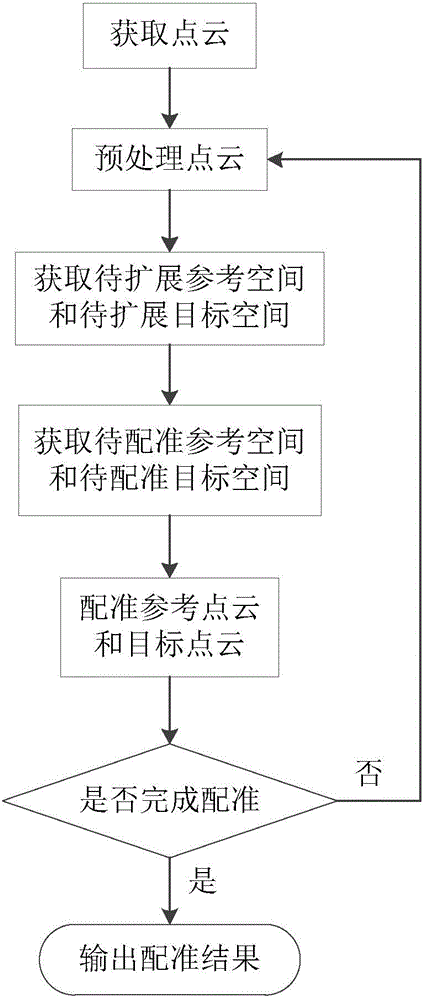
[0057] Reference figure 1 The specific implementation steps of the present invention are as follows:
[0058] Step 1. Obtain the point cloud.
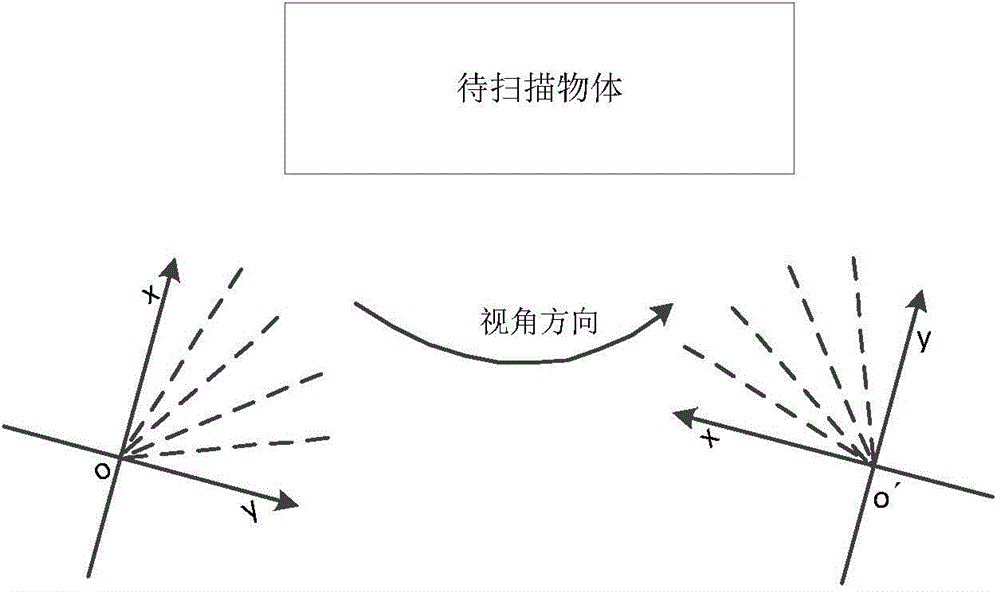
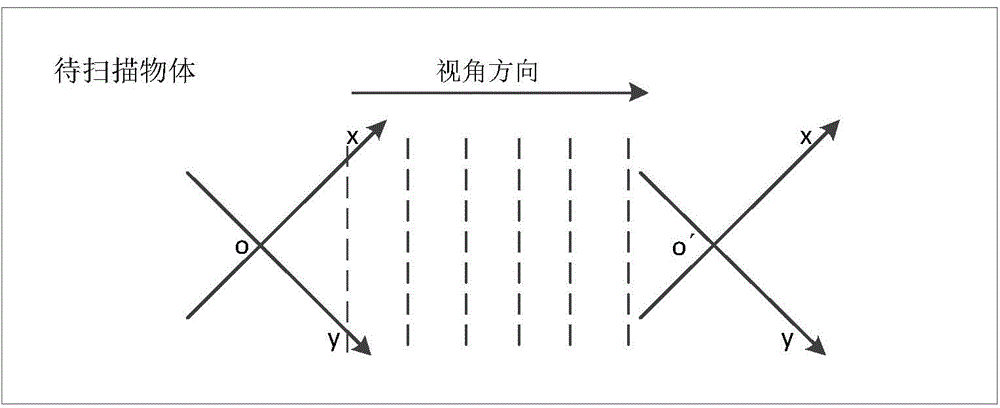
[0059] Choose different scene scanning methods according to the scene to obtain the point cloud of the object to be scanned. Specifically, ensure that the laser point cloud data of two adjacent stations have an overlapping area in the scanning angle of the scanner. The actual scanning should ensure that the angle of view is at least greater than 90°, for these different scanning scenes and scanning parameters of the scanner, adjust the viewing angle of each scan and the data collection distance of the two stations. The scene scanning method is as follows: if the scene is centered around the object to be scanned To move the scanner, select multi-view scanning, scan from multiple directions around the object to be scanned, and obtain a point cloud ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com