Double-eccentric circle obstacle crossing assembly with variable eccentric distance and wheel-leg robot
A technology of eccentric circle and eccentric distance, which is applied in the field of robot walking devices, can solve the problems of high-power drive, complex mechanical structure, and difficult control, etc., and achieve the effect of simple and reliable structure, simple mechanical structure and good controllability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than for limiting the protection scope of the present invention.
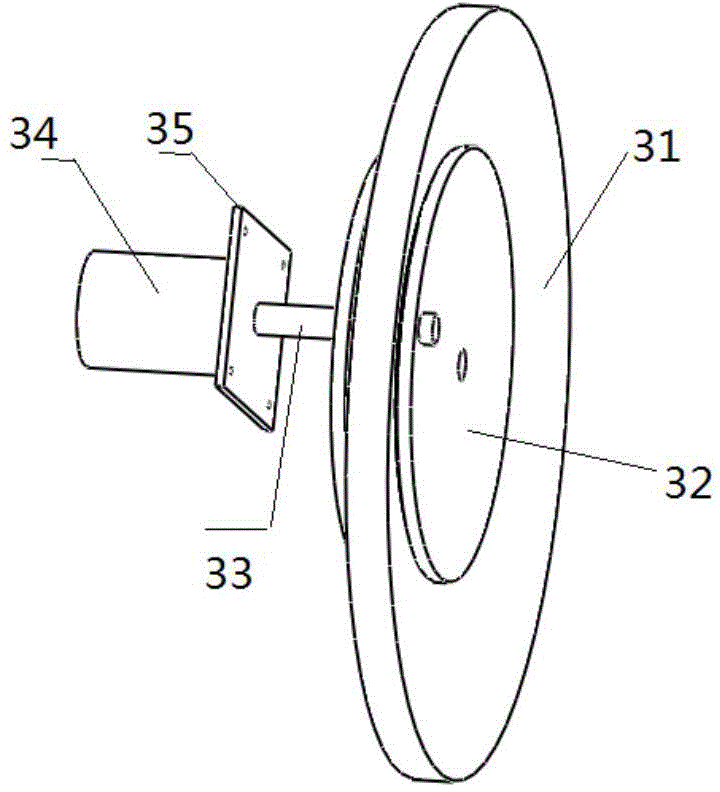
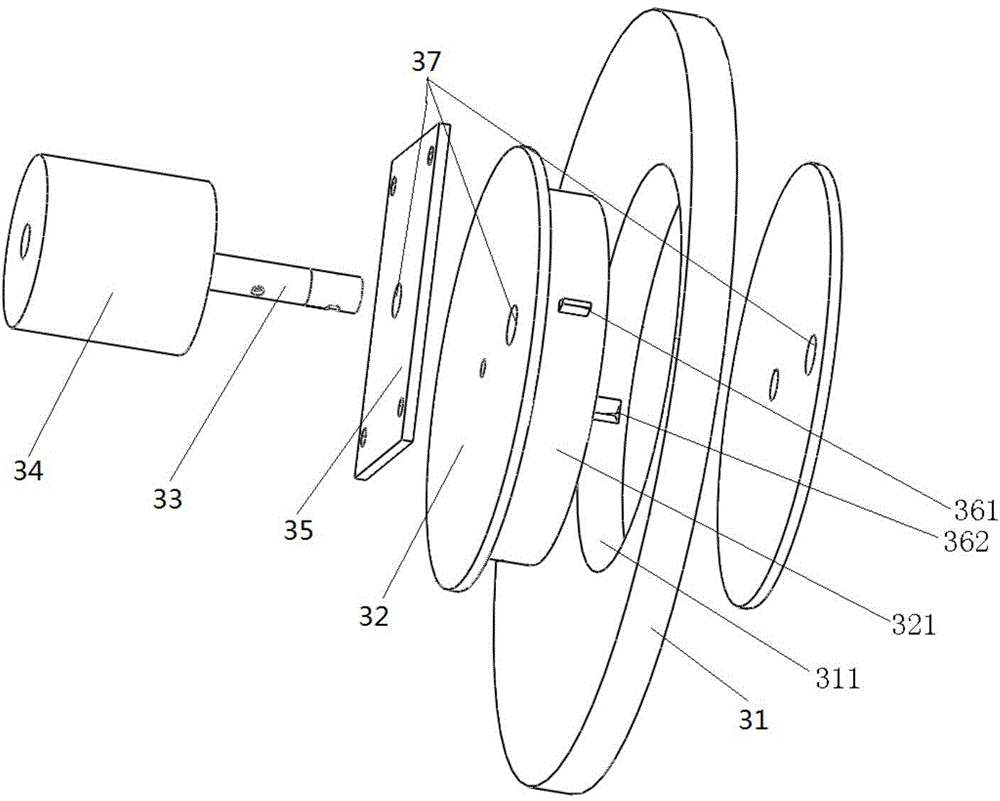
[0033] A double eccentric circle variable eccentric distance obstacle crossing assembly includes an inner wheel 32 and an outer wheel 31 that are both eccentric wheels, the inner wheel is rotatably arranged in the outer wheel, and an outer ring surface 321 of the inner wheel is provided with A plurality of first limiting devices 361 are provided, and the inner ring surface 311 of the outer wheel is provided with second limiting devices 362 that cooperate with the first limiting devices.
[0034] The inner and outer wheels are provided with drive holes 37 .
[0035] Based on the above-mentioned double eccentric circle variable eccentric distance obstacle crossing assem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com