Obstacle detection method
An obstacle detection and obstacle detection technology, which is applied in the field of obstacle detection, can solve the problems of dangerous driving of motor vehicles, large data point errors, and inability to distinguish obstacles stably, so as to achieve the effect of avoiding accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] In order to explain in detail the technical content, structural features, achieved goals and effects of the technical solution, the following will be described in detail in conjunction with specific embodiments and accompanying drawings.
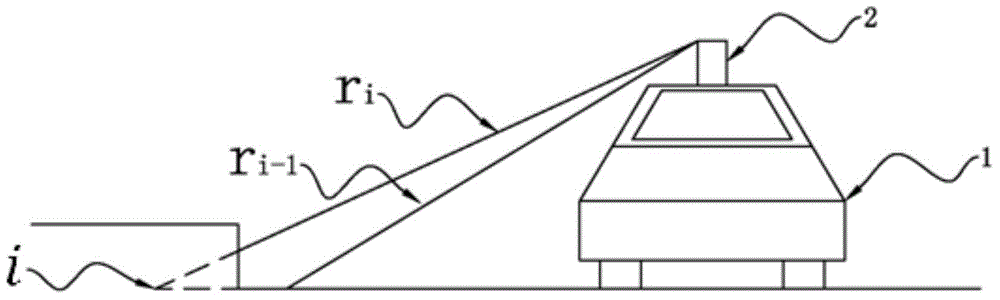
[0040] see figure 1 As shown, this embodiment provides an obstacle detection method, which can be applied to the control module of the motor vehicle 1 to realize the obstacle detection. The control module is connected with a surround-view laser radar 2, which is generally installed on the roof of the motor vehicle 1, and the surround-view laser radar can perform 360°. Laser scanning can obtain the environmental information of the motor vehicle, including road surface information.
[0041] This method includes the following steps when performing obstacle detection: Obtaining the measured straight-line distance r of the point i beam i by looking around the lidar i ; Obtain the measured straight-line distance r of the adjacent beam i-1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com