A multi-camera joint active tracking method for robotic arm teleoperation
A multi-camera, active tracking technology, applied in manipulators, manufacturing tools, etc., can solve problems such as inability to ensure mechanical arms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] The multi-camera joint active tracking target method for the teleoperation of the mechanical arm proposed by the present invention comprises the following steps:
[0043] (1) Place multiple cameras on the upper left, upper right and front of the robotic arm, calibrate the cameras, and obtain the internal parameter matrix M of multiple cameras respectively 1 , external parameter matrix M 2 , distortion coefficient and pose transformation matrix T 12 , T 23 , T 34…… ,Specific steps are as follows:
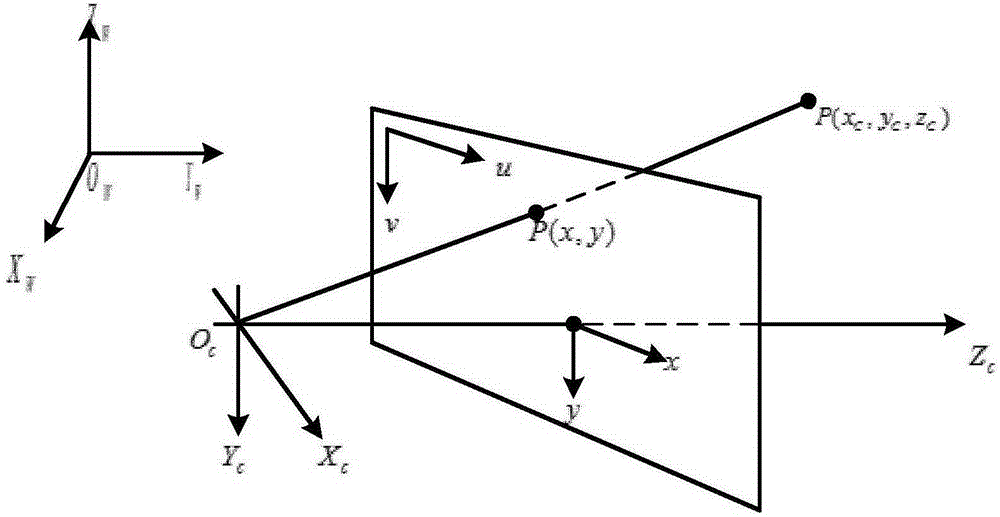
[0044] (1-1) If figure 1 As shown, let the coordinates of the spatial point P in the camera coordinate system be P(x C ,y C ,z C ), so that the spatial point P is projected onto an image plane along the ray passing through the optical center, an image coordinate system is established in the image plane, and the projected coordinates of the spatial point P in the image coordinate system are P(x, y), The projection coordinates are expressed as coordinates in the computer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com