Random coupling and multi-load laying method for autonomous underwater vehicles
A random coupling and multi-load technology, applied in the direction of three-dimensional position/channel control, etc., can solve problems such as difficulty in obtaining real-time motion status, limited underwater visibility, and low information update rate, so as to reduce the amount of collaborative calculations and simplify motion coordination. process, the effect of improving safety and navigational precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
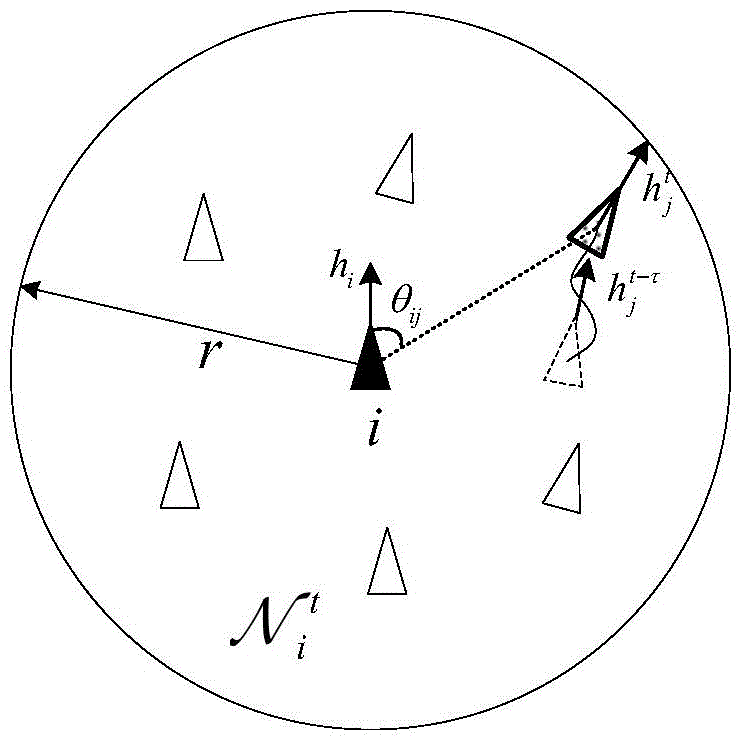
[0021] The present invention is aimed at a multi-AUV system formed by salvaging N AUVs carrying payloads. After each AUV is launched into the water and started, it will maintain a constant thrust and move at a uniform speed, and implement course adjustment by changing the navigation direction. N AUVs sail to the same target position and maintain heading until approaching the target constant. Each AUV is equipped with a camera, which has the ability to perceive the distance, motion direction and relative orientation of other AUVs in the vicinity based on image information. Limited by the underwater visibility and equipment resolution, the perception range of the visual perception equipment has a certain limit, recorded as r>0, then the neighbor of i at time t Can be expressed as:
[0022] N i t = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com