Object Location Method Based on Constraint Information
A technology for target positioning and constraining information, applied in satellite radio beacon positioning systems, measuring devices, instruments, etc., can solve problems such as low estimation accuracy, limited application range, and positioning accuracy to be improved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0059] The present invention is described in detail below in conjunction with accompanying drawing:
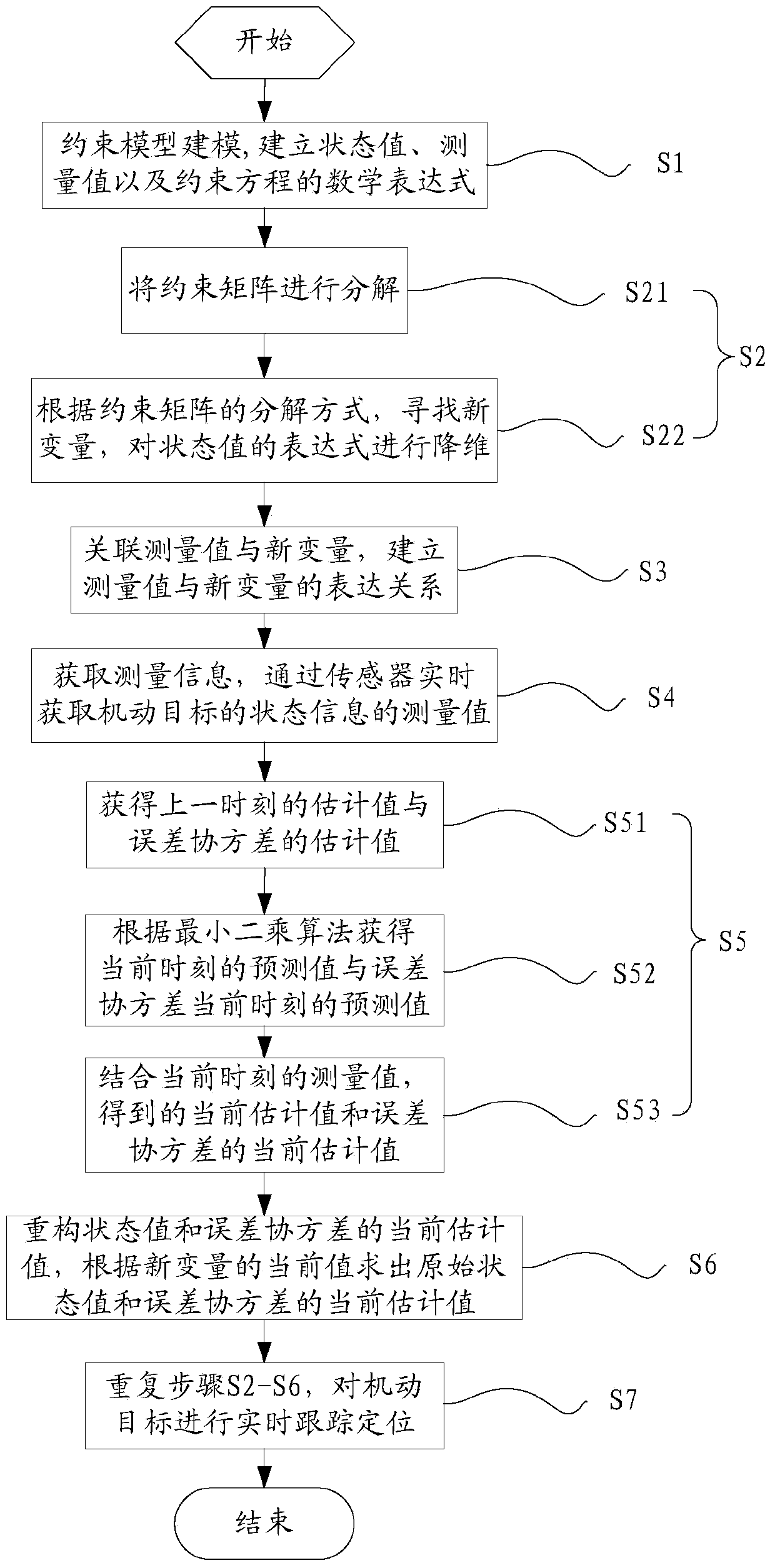
[0060] Such as figure 1 As shown, the present invention provides a target positioning method based on constraint information for real-time tracking and positioning of maneuvering targets, including the following steps:
[0061] S1: Constraint model modeling, respectively establish state value x k , measured value z k and the mathematical expression of the constraint equation; specifically, the state value x k and measured value z k Satisfy the mathematical expressions (1) and (2) respectively:
[0062] x k =A k x k-1 +Γ k u k-1 +w k-1 (1)
[0063] z k =H k x k +v k (2)
[0064] Constraint equation: D k x k = d k (3)
[0065] Among them, k is the sampling time value; the state value Contains four state elements; u k-1 is a known input; the process noise w k and v k is Gaussian white noise with zero mean; w k and v k The covariance of U k and R k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com