Long-distance navigation method of navigation of autonomous underwater vehicle
An autonomous vehicle and long-range navigation technology, which is applied in the field of underwater autonomous vehicle navigation and long-distance navigation, can solve problems such as applications in difficult and unknown environments, difficulties in prior databases for full-time and space-time navigation, and reduction of long-range navigation capabilities of underwater vehicles. Improve the ability of autonomous navigation, get rid of the dependence on prior database, and enhance the effect of autonomous movement ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
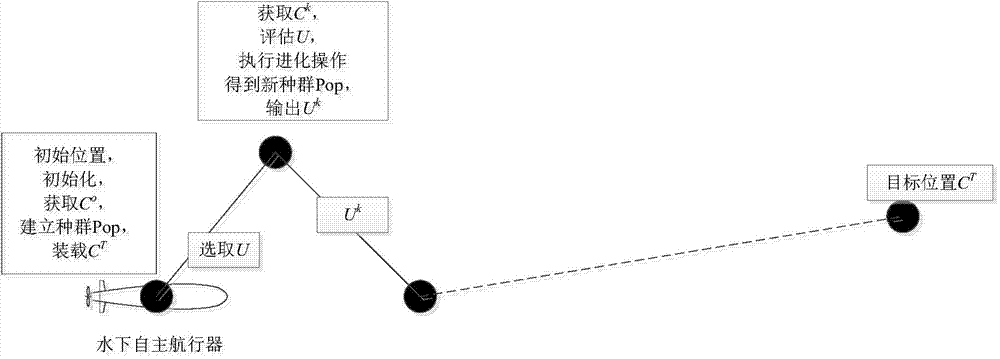
[0025] In order to get rid of the dependence of geophysical field navigation on the prior database and provide a remote autonomous navigation method for underwater autonomous vehicles, this invention proposes a remote underwater vehicle navigation method inspired by the principle of long-distance biological migration. The method does not depend on the existence of a priori database, has the characteristics of complete autonomy, and can implement long-range navigation tasks in complex and unknown environments.
[0026] From the perspective of bionics, the geophysical field is reduced to a mixture of various parameters, and any position P in space can be uniquely described by the geophysical field parameter C as:
[0027] C p =:{c 1 ,c 2 ,...,c n} (1)
[0028] Among them, n represents the number of parameters.
[0029] Then in the navigation process, i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com